Kinect 3d scanner software open source
Open Source Kinect stand-alone 3D Scanner
- The 2015 Hackaday Prize
View Gallery
Team (7)
- Mario Lukas
- ntrewartha
- Darksider7
- enesgonul2
- bwang40
- Heydar Elahi
- Tushar Nakini
Related lists
2015 Hackaday Prize: Quarterfinalists
Projects that were officially submitted to the 2015 Hackaday Prize
Python Powered Projects
Projects running the Python programming anguage
3D Scanner
What else can I say?
3d
Ed print
Workshop
Work related
This project is submitted for
- Hackaday.
com Tip Line
- The 2015 Hackaday Prize
This project was created on 06/08/2015 and last updated 3 years ago.
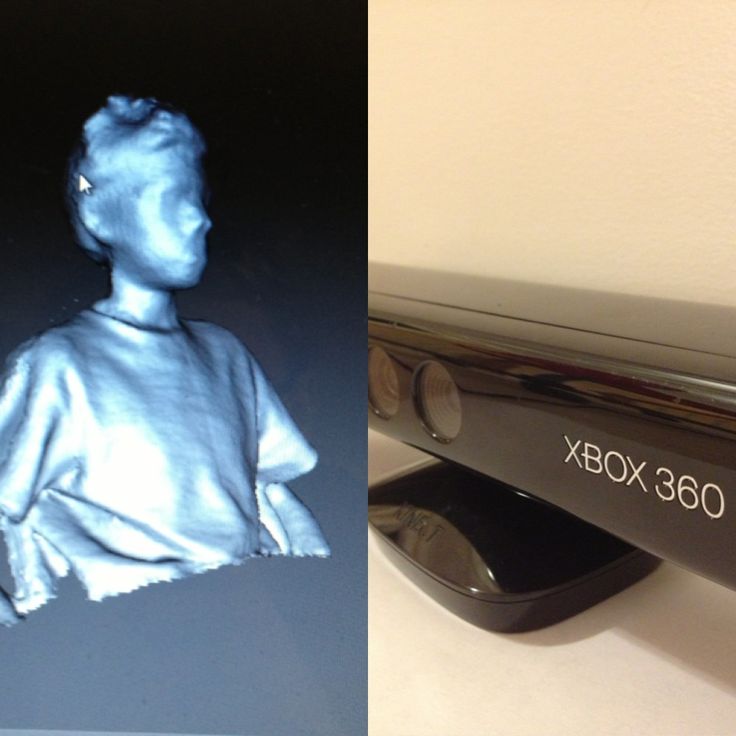
The idea behind this project is a low-cost Mobile Raspberry Pi2 and Kinect based 3D Scanner.
Use cases:
- saving/archiving cultural heritage
- medical applications
Details
- 1 × Microsoft Kinect
- 1 × Raspberry Pi2
- 1 × Raspberry Pi Display
- 1 × Battery Pack
- 1 × SD-Card
View all 8 components
-
Software development
Mario Lukas • 09/27/2016 at 20:34 • 0 commentsMany people ask for a software during the last year.
 Until last year this was only a proof of concept project for me. But the good news is that i will make it happen. I am working simultaneously on the FabScanPi project . Most of the FabScanPi software can be reused for this project. Thats the reason why i prepared the FabScanPi software to add a module for Kinect support in the last month.
Until last year this was only a proof of concept project for me. But the good news is that i will make it happen. I am working simultaneously on the FabScanPi project . Most of the FabScanPi software can be reused for this project. Thats the reason why i prepared the FabScanPi software to add a module for Kinect support in the last month. So if you want to stay up to date, follow also the FabScanPi project.
-
Maker Faire Berlin
Mario Lukas • 09/23/2015 at 07:33 • 0 commentsI was able to compile some software for the scanner. And hopefully this software will work. I had not the time to test it until now but come and visit our booth at Berlins first Maker Faire on 3th and 4th of October.
 You can find this project at the booth of "Freie Maker".
You can find this project at the booth of "Freie Maker". -
Chaos Communication Camp 2015.
Mario Lukas • 08/05/2015 at 08:42 • 2 commentsI will bring this project to the ccc camp from 13 - 17 August for working on the software.
-
Work on Software starts today.
Mario Lukas • 07/18/2015 at 11:53 • 0 commentsI had to finish the Software of my other project FabScan Pi.
 But today i will start to write the Software for the Kinect Scanner.
But today i will start to write the Software for the Kinect Scanner. -
Compiling instructions for libfreenect
Mario Lukas • 06/10/2015 at 06:48 • 0 commentsThe project is in an early state now. But you can find compiling instructions for the libfreenect kinect library and raspberry pi at http://www.mariolukas.de/2015/04/proof-of-concept-3d-scanner-with-kinect-and-raspberry-pi2
-
Kinect + Raspberry Pi2
Mario Lukas • 06/08/2015 at 11:56 • 0 commentsA first test of using a Kinect with Raspberry Pi2 is done.
 Libfreenect compiles without any problems on a Raspberry Pi2.
Libfreenect compiles without any problems on a Raspberry Pi2.
View all 6 project logs
Enjoy this project?
ShareBlog | ReconstructMe | Real Time 3D Scanning Software
Today, it’s our pleasure to announce completely new scanning strategy that improves hand-held scanning in many ways. Although we are in a prototypical stage, we wanted to share the lasted achievements with our readers.
Limitations of hand-held scanning
One of the major issues with hand-held scanning is the fact that the set of tolerated scan motions does not match your natural sequence of movements. This means that you are often constrained to move slower than intended, plus you have make sure that the scanner points at areas of interest and keeps a certain distance to the object being scanned. Violation of any of these contraints leads to ‘tracking lost’ and corrupted data scenarios. We’ve seen unexperienced users being frustrated by these implicit scanning assumptions more than once. Moreover, this frustration quickly turned into to refusal of the 3D scanning technology all together.
Violation of any of these contraints leads to ‘tracking lost’ and corrupted data scenarios. We’ve seen unexperienced users being frustrated by these implicit scanning assumptions more than once. Moreover, this frustration quickly turned into to refusal of the 3D scanning technology all together.
Improving usability
So, we thought about ways to improve the usability of the system and came up with the following. In the video linked below you can see a new low-cost 3D scanning device that does not lose track no matter how jerky the movements are.
Features at a glance
Robustness
The new system is robust to any kind of jerky movements. Move naturally and never lose track again. In case you put the scanner aside for a pause, you can immediately pick up scanning from any location within the scanning area.
High accuracy
The system offers a constant error behaviour across the scanning area. Accumulation of errors due to drift is suppressed. The tracking accuracy is mostly independent of surface material and geometric structure of the scene.
Accumulation of errors due to drift is suppressed. The tracking accuracy is mostly independent of surface material and geometric structure of the scene.
Low-cost components
We’ve put strong efforts into cutting costs by using commodity hardware components.
Scale
The supported scanning area is flexible – from desktop up to areas that easily fit an entire car.
We plan to release more material soon. We hope we’ve raised your interest. Stay tuned!
This entry was posted in 3D Scanning on by Christoph Heindl.We’ve just released a new version of ReconstructMe SDK that supports all currently available Intel RealSense (F200, R200, SR300) models. reme_sensor_create now accepts a librealsense driver argument that will try to open the default Intel RealSense camera. More options can be set by via sensor configuration files.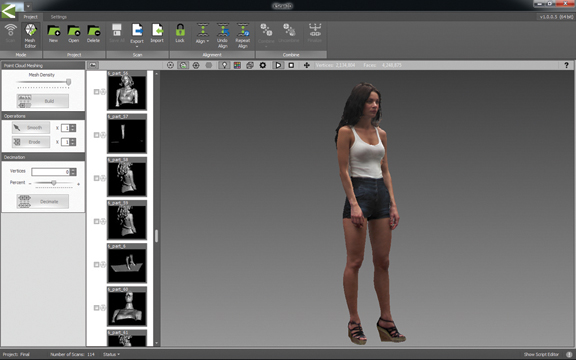 Multiple camera support is also available. See
Multiple camera support is also available. See reme_sensor_bind_camera_options for a list of available options.
Download ReconstructMe SDK 2.6.43 x64 for Windows 7/8/10.
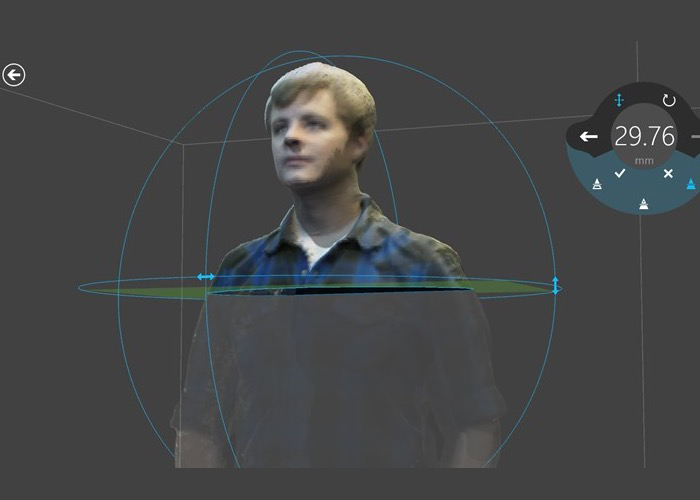
This entry was posted in 3D Scanning on by Christoph Heindl.Good morning everyone! We had a great Long Night of Research in April this year with more than 300 people visiting us at PROFACTOR. We scanned more than 80 people using a turntable and a single Intel SR300 camera using ReconstructMe. Here’s a good example of what those scans look like.
All models have been generated automatically without any manual interaction whatsoever! Please note that models are uncompressed and take a while to load up in your browser. Head over to entire scan collection.
License
Unless otherwise stated, all 3D model files are licensed under CC BY-NC 4.0. This means you can share or adapt them as long as you give appropriate credit and don’t use the material for commercial purposes.
Our team has been working hard in the past couple of months to improve overall reconstruction quality of ReconstructMe. We’ve put a lot of our attention towards generating photo realistic 3D scans using low-cost consumer sensors.
What we’ve come up with is a unique texturing pipeline that runs fully automatically and is able to compensate most of the artifacts caused by illumination, motion and other sources of errors. The interactive 3D viewer below shows a 3D bust generated using this work-in-progress technology.
The setup consists of a single INTEL sensor and a standard desktop PC running ReconstructMe. The bust was generated automatically. No manual interaction whatsoever.
Please be patient while loading as the geometry and textures are uncompressed.
We’d be happy to receive your feedback.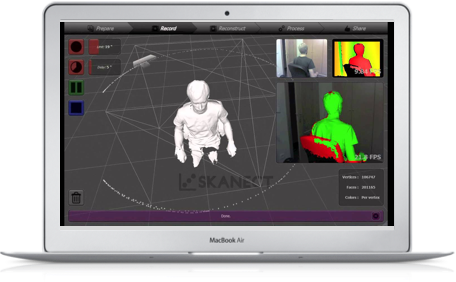
We are proud to announce ReconstructMe v2.5.1034. This updated simplifies and improves the configuration of your sensor. Either select a supplied configuration, tailor-made for every supported sensor, or write and tweak your own configuration as before.
Additionally we made improvements to the user interface as we refactored parts of the ui code – most important ReconstructMe is now dpi aware and can be used out of the box on high resolution displays.
We also improved the rendering code, resulting in less overhead and more efficient usage of the GPU.
This entry was posted in 3D Scanning on by Thomas Pönitz.As you know ReconstructMe already supports a variety of commodity 3D cameras and we are working hard on integrating new and exotic ones as soon as we take notice of them. We felt it is about time to put details into perspective. Therefore we are kicking off a camera review series to cover sensor specifications, installation instructions and more.
We felt it is about time to put details into perspective. Therefore we are kicking off a camera review series to cover sensor specifications, installation instructions and more.
Starting with the Intel RealSense R200 review, we plan to have an in-depth review of each sensor supported in ReconstructMe. The list of supported sensors and reviews can be found on our supported sensors page.
This entry was posted in 3D Scanning on by Christoph Heindl.On behalf of the ReconstructMe team, I’m proud to announce ReconstructMe v2.4.1016. This update improves support for the following sensors
- Intel RealSense F200
- Intel RealSense R200
You can grab the latest version from our download page. We are releasing this version free of charge for non-commercial projects as announced recently.
Usage
To use Intel RealSense cameras on your computer you will need to install Intel RealSense camera drivers and use the correct ReconstructMe sensor configuration files. For your convenience, you can download both from below.
For your convenience, you can download both from below.
- Intel RealSense F200 Camera Driver v1.4.27, Intel RealSense Runtime and F200 Sensor Configuration File
- Intel RealSense R200 Camera Driver v2.0.3, Intel RealSense Runtime and R200 Sensor Configuration File
Once you have installed the necessary components, open ReconstructMe and set the path to the configuration file as shown in the screenshot below.
Troubleshooting
Please note that Intel recommends connecting the sensors to a dedicated USB3 port directly. Avoid using hubs or extension cables. When your sensor does not respond for longer period of time, restarting the Intel depth camera services might help. You can easily find these services in local services management console as shown below
This entry was posted in 3D Scanning on by Christoph Heindl.From now on, ReconstructMe – our user interface for digitzing the world in 3d – is available to everyone for free!
We offer ReconstructMe free of cost and without limitations for private and non-commercial projects. This means you can download ReconstructMe and use it for everything from scanning for 3d printing, architecture, documentation and animation. For commercial purposes we continue offer royality fee based licenses of ReconstructMe and ReconstructMe SDK.
This means you can download ReconstructMe and use it for everything from scanning for 3d printing, architecture, documentation and animation. For commercial purposes we continue offer royality fee based licenses of ReconstructMe and ReconstructMe SDK.
Head over to the download area and grab the latest version in order to set it free. If you already have ReconstructMe licensed, but your license expired, then re-open ReconstructMe and it will run in non-commercial mode instead of unlicensed mode.
This entry was posted in 3D Scanning on by Christoph Heindl.Use the opportunity to discuss with numerous international experts from 10 countries and 3 continents, both from science and industry, what 3D printing technologies offer today and what they can be expected to offer in the future.
What is special about Add+it 2015?
Workshops provide the opportunity to interact with participants and experts; discuss relevant 3D printing issues and initiate possible further business cooperations.
The Add+it 2015 is organized by PROFACTOR and IPPE, the Institute of Polymer Product Engineering at the Johannes Kepler University Linz.
Registration and Fees
- Further information on venue, programme and registration is available on the conference website.
- The registration form should preferably be completed online. Deadline for registration: August 20, 2015
Early registration with a discount of € 30,- is extented until August 10, 2015!
This entry was posted in 3D Scanning on by admin.As promoted in our previous post we added a new color tracking feature to the SDK and promised to release a new UI frontend version supporting it. Today it is my pleasure on behalf of the ReconstructMe team to announce this new fronted release.
In the video below you can see ReconstructMe UI in action. Both scenes are tracked mainly due to color information, as the geometric information alone (planar shape in first scene and cylindrical shape in second scene) do not suffice to estimate the camera position accurately.
Color tracking is currently enabled for all sensors that support a RGB color stream. Algorithm settings are chosen automatically, so you don’t have to configure anything. In case your sensor does not support RGB the algorithm gently falls back to geometric tracking only. Note that scanning colorized is not a requirement for the color tracking algorithm to work properly.
Here are some tips for best results
- Ensure that the scene you observe is texturally and/or geometrically rich. Although we’ve tuned the algorithm to cope with lack of information in both streams, we need at least some information to be present in the scene.
- Try to get around 25-30 frames per second. Color tracking requires small increments in the transformation of the camera, otherwise it will not converge. Please note that the color tracking does more than geometric tracking alone, so it has a small increased runtime footprint.
- Try to avoid fast camera motions that potentially blur color images.

- Try to avoid reflective materials. Although a reflection appears as texture, it visually changes when moving the camera.
After weeks of hard work we are proud to announce a new upcoming feature called color tracking. Color tracking incorporates color information into camera motion estimation. This allows ReconstructMe to keep track over planar regions, cylindrical shapes or other primitive shapes. The following video shows some challenging reconstructions that succeed with the help of color tracking.
The new tracking algorithm seamlessly blends geometric and color information together, leading to an overall improved tracking performance in almost all situations. During development we’ve paid attention to robustness and runtime. As far as robustness is concerned, we’ve made sure that fast variations in illumination or camera auto exposure do not affect the tracking performance.
From a developer and user point of view you should be aware of the following points to maximize tracking stability.
- Ensure that the scene you observe is texturally and/or geometrically rich. Although we’ve tuned the algorithm to cope with lack of information in both streams, we need at least some information to be present in the scene.
- Try to get around 25-30 frames per second. Color tracking requires small increments in the transformation of the camera, otherwise it will not converge. Please note that the color tracking does more than geometric tracking alone, so it has a small increased runtime footprint.
- Try to avoid fast camera motions that potentially blur color images.
- Discard the first few camera frames as we have observed cameras to vary exposure vastly in these frames.
- Make sure that the color camera is aligned to depth camera in space and time.
In case tracking fails we’ve also added a recovery strategy that takes color information into account.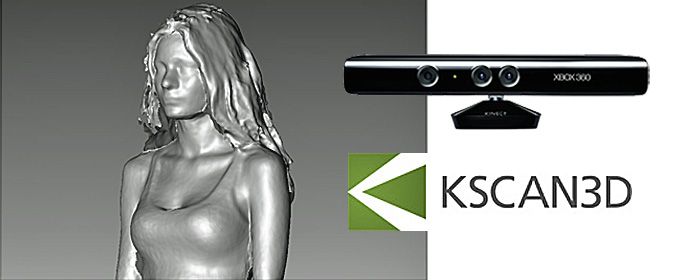 This global color tracking allows you to recover by bringing the sensor in a position that is close to the recovery position shown as shown in the following video.
This global color tracking allows you to recover by bringing the sensor in a position that is close to the recovery position shown as shown in the following video.
Our roadmap forsees that we first release a new end user UI version that supports color tracking in the coming days. This will allow us to have many people test the current state of the algorithm and hence provide us with valuable feedback.
This entry was posted in 3D Scanning on by Christoph Heindl.We’ve completed our work on the PayPal backend and opened the shop again. Please feel free to place your orders.
Best,
Christoph
Please note, that our our web-shop is closed for maintenance reasons regarding PayPal rearrangements. We plan to be back online in a couple of days.
We plan to be back online in a couple of days.
In case you need volume licenses instantly, please drop us a mail at [email protected].
Thanks,
Christoph
We continue to update ReconstructMe and are happy to announce our newest release supporting Intel HD 4000/4600 and Intel CPU Core i5/i7.
In case you intend to run ReconstructMe on a Intel HD graphics card, please update the graphics driver. If you favor running ReconstructMe on your Intel CPU install the latest OpenCL runtime.
Have fun reconstructing and let us know what you think!
This entry was posted in 3D Scanning on by Christoph Heindl.We have just released new version of ReconstructMe. This is a bug-fix release that resolves immediate tracking lost issues on NVIDIA cards: our users reported immediate tracking-lost issues when starting a scan.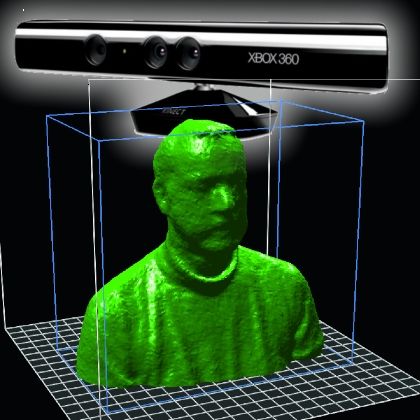 The issue seems to occur on NVIDIA cards, with preference on the following models: GTX750, GTX970, GTX960, GTX840M, GTX850M. In case you are affected, please try to run the latest version.
The issue seems to occur on NVIDIA cards, with preference on the following models: GTX750, GTX970, GTX960, GTX840M, GTX850M. In case you are affected, please try to run the latest version.
(There is a solution) Open source 3D scanning
3d-design scanning open-source
I'm trying to make a 3D structured light scanner using one camera, a light projector and a turntable.
After a few days of googling, I didn't find any solid open source projects that I could get to work. SLStudio did seem like a good choice, but it didn't compile properly.
I was wondering if anyone knows of a good open source code that they used with the same setup? Any help would be greatly appreciated. I'm blocked here.
@Hamza Tasneem, iry
Discussion
7 answers
Best answer:
▲ 0
I have several truly useful resources, but I got rid of the structured light approach due to the smaller ones due resources.
I used VisualSFM(.exe) , VisualSFM(source) with turntable for this purpose and got pretty neat results. Works well and is easy to use.
, @ Hamza Tasneem
▲ 1
Try Brown University School of Engineering: Projector and Camera Calibration / 3D Scanning Software.
I haven't tried it myself, but take a look.
, @ NccWarp9
▲ 1
This is not structured light. A laser is used for this:
https://hci.rwth-aachen.de/fabscan
But this is completely open source software / open source hardware.
See also here:
https://www.thingiverse.com/thing:14198
https://www.youtube.com/watch?v=hBueeqDJ6rQ
. @ Lars Pötter
▲ 2
I was also looking for some free or paid 3D scanning software and the closest I found to something that could work is http://wedidstuff. heavyimage.com/index.php/2013/07/12/open-source-photogrammetry-workflow/ But it is not a light structure (does not use a projector)
If you want to stick with structured light I would suggest looking into OpenCV (http://docs.opencv.org/trunk/d1/d90/group__structured__light.html#gsc.tab=0) looks like you could do something about it.
, @ user802599
▲ 12
I've only found one 3d scanner that uses structured light. There are many projects using a laser diode. And these systems are completely open source.
3D Structured Light Scanning by kylemcdonald
- http://www.instructables.com/id/Structured-Light-3D-Scanning/?ALLSTEPS
Sardauskan
- http://www.instructables.com/id/Build-a-30-laser/?ALLSTEPS
- https://github.com/Sardau/Sardauscan
- http://www.thingiverse.com/thing:702470
ATLAS 3D Scanner
- http://www.
 freelss.org
freelss.org - http://www.thingiverse.com/thing:1280901
- https://www.kickstarter.com/projects/1545315380/atlas-3d-the-3d-scanner-you-print-and-build-yourse/posts/1475722
Ciclop
- http://diwo.bq.com/en/tag/ciclop/
- https://github.com/bqlabs/ciclop
3D(ollar) scanner
- https://hackaday.io/project/2021-3dollar-scanner
- http://www.instructables.com/id/Lets-cook-3D-scanner-based-on-Arduino-and-Proces/?ALLSTEPS
"Super Do Anything" Tutorial on How to Make a Simple 3D Scanner
- https://www.youtube.com/watch?v=-qeD2__yK4c
- http://www.thingiverse.com/thing:1413891
- http://diy3dprinting.blogspot.de/2016/04/super-make-something-tutorial-on-how-to.html
$15 3D scanner consists of a milk bath and a smartphone
An interesting idea of using milk and a phone.
- http://www.
 instructables.com/id/GotMesh-the-Most-Cheap-and-Simplistic-3D-Scanner/
instructables.com/id/GotMesh-the-Most-Cheap-and-Simplistic-3D-Scanner/ - http://www.3ders.org/articles/20160423-this-3d-scanner-consists-of-a-tub-of-milk-and-a-smartphone.html
, @ amra
▲ -2
BQ Ciclop 3D Scanner
- Scan volume: Over 5 cm x 5 cm and under 20 cm x 20 cm
- Scanning accuracy: 0.5 mm
All necessary parts for the Ciclop are included in this DIY kit, which comes unassembled.
This Ciclop 3D Scanner Parts List:
- 1 x Plastic Parts( 1 set with 11 pcs)
- 1 x Arduino Uno R3 with USB cable
- 1 x ZUM Scan Shield
- 1 x Stepper driver A4988
- 1 x C270 HD camera
- 1 x Nema17 stepper motor
- 2 x Laser
- 1 x Power adapter
- 1 x 16014 ball bearing
- 1 x threaded rod M8 (9 pcs)
- 2 x Acrylic panel
- 1 x 8 mm spiral wrapping tape
- 1 x Set of screws and nuts
, @ Shawn Maker
▲ 2
You can use the Xbox 360 Kinect Sensor OR the Xbox One Kinect Sensor. This sensor allows you to get a real 3D surface using the SDK. You can connect these devices directly to your computer using USB (I have one).
This sensor allows you to get a real 3D surface using the SDK. You can connect these devices directly to your computer using USB (I have one).
Even the Xbox One model has an example in its SDK that allows you to export the captured mesh as STL files.
, @ Jairo Andres Velasco Romero
Top 13 3D scanners on the market!・Cults
In the past, 3D scanners were mainly used for industrial and professional applications. For example, scanning architectural objects or creating digital models for films. As technology advances, the price continues to drop. Now, 3D scanning gives the average person the ability to custom-make just about anything they want. With more affordable prices, 3D scanning is becoming more accessible to consumers for personal use.
But first, a basic overview of 3D scanning:
A 3D scanner scans real objects and passes the image data to a 3D modeling program.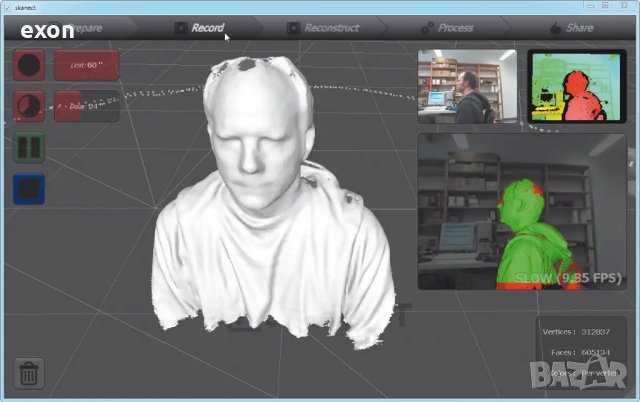 The object can then be manipulated in the software and - if desired - exported and created on a 3D printer.
The object can then be manipulated in the software and - if desired - exported and created on a 3D printer.
1. Select any object (or person!) you want to scan
Why is 3D scanning useful?
Imagine if you could scan your body and see how clothes fit and look online before you order them? 3D scanning technology can do just that. For example, bodylabs uses 3D scanning to understand how products will work for customers based on their body shape and posture.
2. Scan it and customize it in 3D modeling software
After scanning the object, you can reduce the size or edit it with free 3D design software. You can then choose to 3D print the edited file.
3. Export your model and print it in 3D!
Once the model has been scanned and edited to your liking, you can export it to .stl format and send it to a printer to bring it to life.
We have listed the 3D scanners below in ascending order of price (from cheapest to most expensive). Their rating does not necessarily reflect our judgment of the quality of the product. We've included some handy YouTube videos that go into more detail about each product.
Their rating does not necessarily reflect our judgment of the quality of the product. We've included some handy YouTube videos that go into more detail about each product.
1. XBox Kinect 3D Scanner - $95 USD
If you want to get by on the cheap, there are ways to use your old Xbox 360 or Xbox One Kinect device to get great results! If you have a Kinect.
2. iSense 3D Scanner for iPhone/iPad - $99
This scanner was developed by 3D Systems as part of the Cubify family. Although they don't sell 3D printers anymore, they keep their 3D scanner in the market. Like a structure sensor, iSense attaches to an iPad or iPhone. Its range of motion is 0.5m more than the Sense.
3. XYZprinting 3D Scanner - $139
XYZprinting 3D Scanner is the cheapest portable 3D scanner on the market. At under $200, it's perfect for anyone looking to get into 3D scanning on a budget.
The size of the scanner is 60 cm x 60 cm x 30 cm, so it is best used for small items. It also uses the new Intel RealSense image capture software, which means it can connect to any Windows device with a 4th generation Intel processor.
It also uses the new Intel RealSense image capture software, which means it can connect to any Windows device with a 4th generation Intel processor.
4. BQ Ciclop 3D Scanner Kit - $199
This open source hardware project has been released under an open source license so that all mechanical design, electronics and software information is available to the community for further development . The full package costs about 199 USD. You can even download the design and print it in 3D!
5. Structure Sensor for iPad - $379
Arguably the best scanner on the market, the Structure Sensor was developed through a Kickstarter campaign that attracted over 3,500 people and raised $1.2 million. Structure Sensor turns your regular iPad into a 3D scanner that captures three streams of data at 30 frames per second.
6. Cubify Sense - $399 USD
Cubify Sense is a portable pen scanner that makes it easy to manually scan 3D objects. This makes it possible to use Sense in quite unique areas, with both advantages and disadvantages. Sense is compatible with Windows and Mac OS.
Sense is compatible with Windows and Mac OS.
7. Matter And Form MFS1V1 Desktop 3D Scanner - $467 USD
The first ever crowdfunded 3D scanner, Matter and Form, is a Toronto-based company that has raised nearly half a million dollars to develop this product. It uses a 3D laser scanner with a movable camera head and a 360-degree rotating platform.
MFS1V1 generates a detailed point cloud, which again works very well in some scenarios and less well in others.
8. XYZprinting Da Vinci 1.0 Pro 3-in-1 3D Printer - $810
Da Vinci 1.0 Pro is both a 3D scanner and a 3D printer. It uses a laser diode module with a 2 megapixel camera (higher resolution than 1.2 megapixel iPad scanners). Please note that this machine uses proprietary 3D printing consumables.
9. Einscan-S - $999
Einscan-S has two scanning modes: automatic and free. The first one is the easiest: just place an object on the rotating surface of the Einscan turntable and the machine will scan it in just 3 minutes with an accuracy of .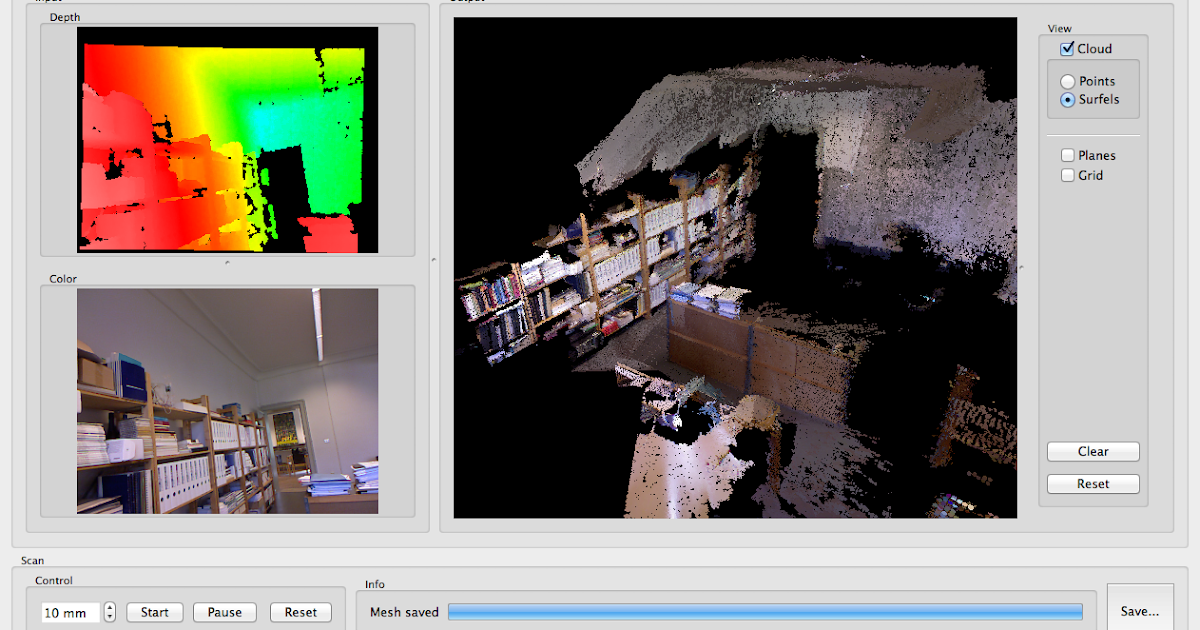 1 mm. For large models, free scan mode works by rotating the scanner on a tripod around the object. Einscan-S generates one STL file that can be sent directly to your 3D printer. Einscan-S produces 3D printable models with greater accuracy (using "Light Structure Phase Shift Technology" instead of lasers) than competitors, providing industrial quality 3D scanning technology within a consumer's budget.
1 mm. For large models, free scan mode works by rotating the scanner on a tripod around the object. Einscan-S generates one STL file that can be sent directly to your 3D printer. Einscan-S produces 3D printable models with greater accuracy (using "Light Structure Phase Shift Technology" instead of lasers) than competitors, providing industrial quality 3D scanning technology within a consumer's budget.
10. IIIDScan PrimeSense 3D Scanner - $1441 USD
Greater accuracy comes at a price. This tripod-mounted 3D scanner is unique in that it uses a short-range image sensor capable of scanning 3D objects in more detail and at a faster rate than other scanners on the market.
11. Fuel3D Scanify - US$1,500
This is a very high speed handheld 3D scanner capable of capturing an object in less than 1/10th of a second. In this regard, it differs significantly from the other 3D scanners on this list. In practice, it's more like taking a 3D photograph than manually scanning an object. Fuel3D Scanify uses a dual HD stereo laser camera combined with photometric data from three xenon flashes to create reasonably realistic 3D scans in the blink of an eye (so to speak). High tech.
Fuel3D Scanify uses a dual HD stereo laser camera combined with photometric data from three xenon flashes to create reasonably realistic 3D scans in the blink of an eye (so to speak). High tech.
12. NextEngine 3D Scanner HD - $2,995 USD
The NextEngine 3D Scanner HD combines portability with very high accuracy - much better than the scanners at the top of this list. Of course, the higher the accuracy, the higher the price! It uses an electro-optical system with a laser array that scans in tandem. The advantage is that the high-precision scanner has no size limits. The scanner comes with its own mesh creation software package, and you can also check out their NURBS and Solid modeling packages as options.
This is the scanner for those who want to get really serious results from their 3D scanning efforts. If you check out the gallery on their site, you can see how much more detailed NextEngine scans are compared to some of the cheaper scanners on this list. Of course, these are the company's own comparisons for marketing purposes, so feel free to take them with a grain of salt!
13.