Alunar 3d printer instructions
ALUNAR M508 QUICK START MANUAL Pdf Download
Download Table of ContentsAdd to my manuals
Bookmark this page Manual will be automatically added to "My Manuals" Print this pageTable Of Contents
2-
page of 41
- Contents
- Table of Contents
- Bookmarks
Advertisement
Table of Contents
Table of Contents
1 Machine Parameters
2 Flow Diagram for Quick Use Manual
Foreword
3 Important Notice and Attentions
4 Preparatory Work
5 Preinstallation Checklist
Step Way of Opening Box
Take an Account of Kits
6 Assembly and Calibration for M508
The Main Machine Structure
Step1 Frame Assembly
Step2 y Axis Assembly and Hotbed Assembly
Step3 Z Axis Assembly and X Axis Assembly
Step4 Extruder Assembly
Step5 LCD Assembly
Step6 Power and Mainboard Assembly
Step7 Filament Rack Assembly
7 Testing and Commissioning
Power on Test
Back to the Origin Inspection
Fan Check
Nozzle and Hot Bed Heating Inspection
Turn on the Power Switch, LCD Display, as Shown in Figure
Hotbed Leveling Test
Rough Debugging to Level Hotbed
Accurate Debugging
Fine Debugging When Printing
Change the Filament
Change the Filament When Not Printing
Change the Filament When Printing
Feature Demonstration
Instruction of Operation Part for Off-Line Printing
The First Memo Interface
The Secondary Memo Interface
Prepare for Printing (Prepare)
Move the Axis and Input& Output the Filament (Move Axis)
The Parameter Adjustment When Not Printing (Control)
Real-Time Parameter Adjustment (Tune)
Parameter Adjustment When Printing (Control)
Print from SD
8 Printing Test
9 Senior Instruction
Off-Line Printing
- How to Use Cura 15.
04
Online Printing
- How to Use Cura 15.
Err: MINTEMP" Alarm Processing Method
Trouble: LCD Screen Is Not Bright
Trouble: Rotation Button Cannot be up and down the Selection Menu
No Extruded Filament When Printing
Problems on the Distance between Nozzle and Hotbed
Model Dislocation When Printing
10 Frequently Asked Questions and Solutions
11 Wire Diagram of Main Board
ALUNAR 3D Printer M508 Quick Start Guide
Service
Skype:[email protected]
Service
Email:[email protected]
Table of Contents
Previous Page
Next Page
Table of Contents
Related Manuals for Alunar M508
- 3D Printers Alunar M508 Prusa i3 Quick Start Manual
(48 pages)
- 3D Printers Alunar M508 Quick Start Manual
Diy 3d printer kit (6 pages)
- 3D Printers Alunar M505 Installation Manual
(40 pages)
- 3D Printers Alunar M505 Installation Manual
(40 pages)
- 3D Printers Alunar R100-01 User Manual
Lesser alunar 3d printers (11 pages)
Summary of Contents for Alunar M508
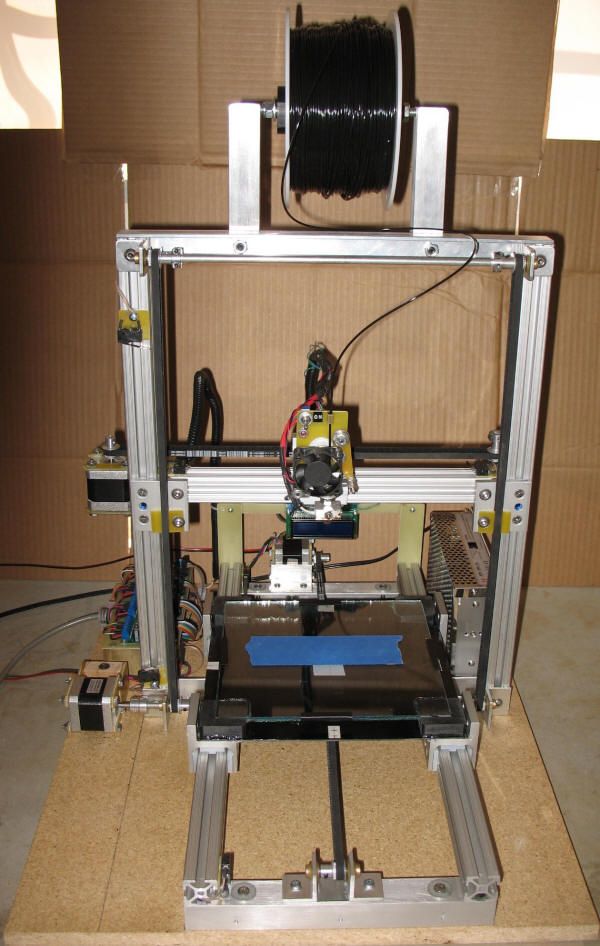
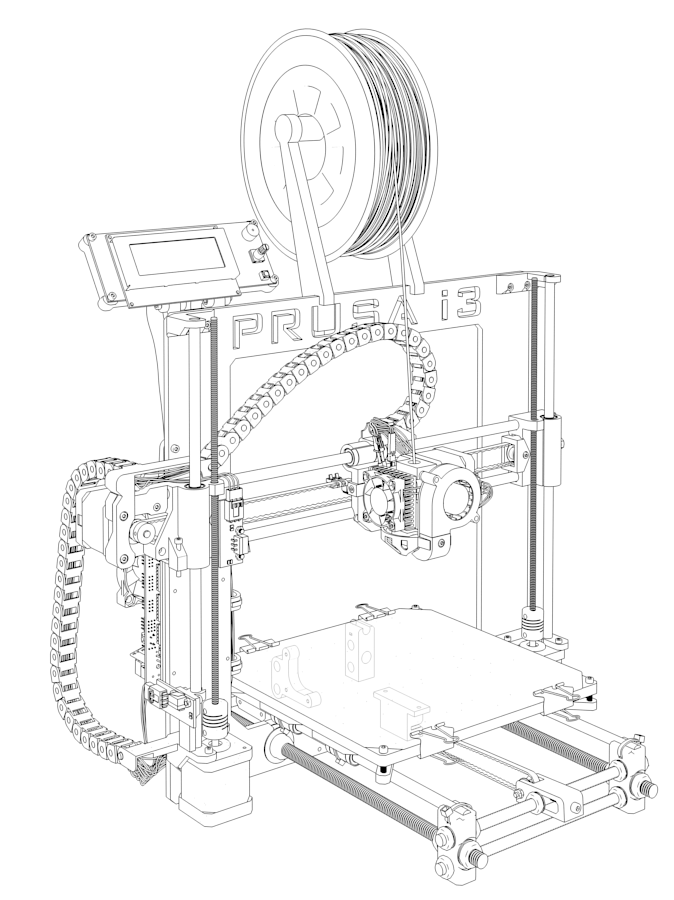
Assembling your ALUNAR 3D printer
The instructions for assembling your 3D printer are in video format. I’ve added notes here to help you interpret and check the video. Be sure to follow these directions very carefully. Also, be sure to watch each segment once before beginning that section of the assembly process. Lastly, you may find it useful to keep a larger picture of the printer open to compare to the video.
I’ve added notes here to help you interpret and check the video. Be sure to follow these directions very carefully. Also, be sure to watch each segment once before beginning that section of the assembly process. Lastly, you may find it useful to keep a larger picture of the printer open to compare to the video.
A. Assembling the X/Y frame (0:00-0:22)
- Before you assemble anything, watch the first 15 seconds of video. At 0:11 note that the aluminum extrusion for the frame you are making are all the same length, but two have a single hole and two have no hole. Be sure to line up your extrusion bars and find exactly those four (each is 37.5cm long). Also note that the bars with the holes go inside the other bars, and that the holes have room for an inset screw on one side but not the other (make sure they are rotated so that is on the same side for both bars). and follow this exactly.
- Be sure the aluminum extrusion bars are rotated correctly to match the video and find the corner pieces to attach the bars.
 Be sure to find an appropriate hex wrench so you can tighten them.
Be sure to find an appropriate hex wrench so you can tighten them. - Check that your corners make right angles once assembled. Now turn your XY frame so that the inset sized holes in the extrusion crosspieces face up, and the small holes face down.
- Insert the right angle pieces and tighten the set screws that should already be placed in them.
- Attach the corner pieces to top of the XY frame. The corner pieces at 00:20 are laser cut acrylic. You’ll find them in a box of spare parts at the bottom of your printer box. You’ll need the T-nuts and the M4 8mm bolts for this, be sure to take the right length bolts from your 8mm & 12mm bolt bag. Also be sure to orient the bolts so that the bolt heads are inset and to orient the nuts so that the rough lines point in (toward the extrusion bar). Be sure to thoroughly tighten every bolt.
B. Assembly of Z Axis frame (0:22-1:03)
- Flip the XY frame over. Now the acrylic pieces and the inset holes are down.
 Then attach the two 44cm long Z extrusion pieces to the frame using two M5 25mm bolts as shown at 00:24 of the video.
Then attach the two 44cm long Z extrusion pieces to the frame using two M5 25mm bolts as shown at 00:24 of the video. - Stabilize the Z axis as shown at 00:32, using the same M4 8mm bolts and T-nuts you used earlier along with the right angle supports. Not shown in the image, but critical is to make use of the washers here, otherwise your M4 8mm bolts might slip right through the holes in the right angle supports.
- 0:50 Attach the brackets for the motors using M4 8mm bolts and T-nuts. Position each one so that it is centered on the z-axis, and they rest against the floor when you place the x-y frame on the floor.
- Next attach the z-axis motors, using the M3 6mm screws. The right motors have identical motor shaft attachments, which resemble those in the video (don’t confuse them with the extruder motor or the x/y axis motors). Note that the cords attachments are not visible in the video because they are facing away from you (toward the shorter side of the x/y frame).
 Don’t overtighten the screws holding the motors as they will strip easily.
Don’t overtighten the screws holding the motors as they will strip easily.
C. Assembly of print bed frame (1:03-1:18)
- Find the 41.5cm long extrusion. As can be seen at 1:04, this is placed across the x/y frame, and should be long enough to sit on top of it.
- Find the acrylic laser cut bed piece with the words X3 cut into it.
- Find the parts visible in the video at 1:06. These include four plastic pillars (found in the bag with the springs), four M5 nuts, four M5 35mm bolts, and 4 bearings. Assemble them as shown in the video. Make sure you tighten them properly (this will require a wrench to hold the bolts as you tighten the nuts).
- Slide the acrylic bed piece onto the crossbar, so that the bearings sit in the indentations in the extrusion. It should roll smoothly along the crossbar.
- Use the right angle supports (with T-nuts, M4 8mm bolts, and washers) to secure the crossbar to the XY frame. Make sure to center it.
 Important: If the printer front is facing you (i.e. the Z axis is more than halfway toward the back of the XY frame), the right angle supports go on the right side of the crossbar.
Important: If the printer front is facing you (i.e. the Z axis is more than halfway toward the back of the XY frame), the right angle supports go on the right side of the crossbar.
D. Attach the Y axis drive and timing belt (1:18-1:40)
- Add the y axis drive motor (1:19). The pointy extension of the laser cut acrylic should point away from the motor power supply. Use the M3 6mm bolts to attach the acrylic to the motor (note that the acrylic is non-symmetric, make sure the bolt heads are inset in it. Also, the set screws on the drive pulley on my motor were loose, so it came off. If that happens to you, just put it back on and tighten slightly (you may want to adjust the position of this later. Be sure one of the two set screws lines up with the flat side of the motor shaft when you do this).
- Add the y axis end stop (1:22). You should at this point compare all three end stops and pick the one with the shortest wire, as you will need a longer wire for the x axis end stop.
 Use the silver-colored M2 10mm bolts and M2 nuts found in the bag with the springs. Be sure to orient the end stop as shown in the video, on the same side of the acrylic as the motor, and with the metal switch opening up and out.
Use the silver-colored M2 10mm bolts and M2 nuts found in the bag with the springs. Be sure to orient the end stop as shown in the video, on the same side of the acrylic as the motor, and with the metal switch opening up and out. - Attach the entire contraption to the crossbar using M4 8mm bolts and T-nuts. You will have to squeeze the bolts in between the wires coming off of the end-stop. Be gentle. Also make sure you are happy with where the wires going are as you tighten things down.
- Find the piece of acrylic shown in 1:28. Do not confuse it with the very similar piece in shape that has more than 3 holes in it. Attach it to the crossbar using M4 8mm bolts and T-nuts, so that the extra hole and rounded end stick out as shown at 1:28.
- Find the bearing, which is pre-assembled and in the bottom half of your printer box. You will need to unscrew the bolt, be careful to keep everything in the right order when you do so. Attach it as shown at 1:28/9.

- Find the timing belt. In the same bag you will find two black zip ties. The timing belt will run along the bottom of the crossbar, in the divet in its center. You’ll need to insert it between the crossbar and the xy frame. This is a good time to also adjust the position of the drive pully on the Y moter shaft, so that the timing belt lines up with the divet on that end. You will also need to insert the ends of the timing belt into the smily face cutouts on the print bed piece (with the X3 on it). With a little dugging you can slide it over until it lines up with the divet there too.
- Tighten and secure the timing belt. Making it tight enough is important for future functioning. Tightening can be done by moving the acrylic piece with the bearing attached (but you have to make sure there is room for it to move in the tighter direction. Assume your belt will loosen and leave your self some extra room for the future).
E. Extruder head carriage assembly (1:40-2:31)
- Find the triangular acrylic piece and motor mount shown at 1:42, along with 4 M4 12mm bolts and 4 M4 nuts.
 Assemble as shown, with the motor mount extending from the long side of the triangular acrylic piece.
Assemble as shown, with the motor mount extending from the long side of the triangular acrylic piece. - Find the triangular acrylic piece (identical to step E1) and 3D printed plastic piece shown at 1:45, along with 2 M4 12mm bolts and 2 M4 nuts. Assemble as shown, noting the orientation and the location of the bolts in the middlemost holes of the acrylic. Do your best to make sure the top of 3D printed piece makes a right angle with the long end of the acrylic piece.
- Find the base for the z-axis threaded rod, and the bolts and nuts to secure it. They should all be in the same bag that the 3D printed piece was in. Assemble them as shown at 1:48.
- Attach the two pieces together as shown at 1:50. You will need six plastic pillars, and three bearings, M5 45mm bolts and M5 nuts. As usual, check orientation before you finish assembling and after.
- Repeat step 1, noting the 90 degree change in relative orientation of the acrylic piece and motor mount (see 1:57).

- Repeat step 2, noting the mirror image orientation (see 2:00).
- Repeat step 3 (2:02).
- Repeat step 4 (2:07). Pay attention to relative orientation.
- Place on the Z-axis frame as shown at 2:12. Pat yourself on the back :).
- You’re not done yet! Attach the extruder crossbar (40cm long) using M4 12mm bolts and T-nuts as shown at 2:22. It should be approximately centered.
- Gently screw in the z-axis threaded rods (2:26). I had to free mine from their saran wrap with a box cutter. Once they are positioned, loosen the thumb screws to move the shaft coupler, which is used to attach the threaded rods to the motors.
- Add the top bar. Use the two remaining M5 25mm bolts to attach it, and make sure you rotate it so that the bolt heads can be inset in the crossbar divet.
- Now pat yourself on the back again!
E. Attach the extruder head and X axis drive motor and timing belt (this is so exciting!). Video sequence 2:34-2:55.
- Attach the X drive motor (2:34) using four M3 6mm bolts. Pay attention to the orientation of the power plug, which should be down. As before, the drive pulley will be loose. Leave it loose.
- Slide the pre-assembled extruder head onto the extruder crossbar. Make sure the extruder head is pointing down (2:36)
- Attach the acrylic bearing to the acrylic bearing mount (2:41). This is the same style of pre-assembled bearing as we used for the Y timing belt (step D5).
- Attach the acrylic bearing mount to the crossbar (2:45) using two M4 8mm bolts and two T-nuts.
- Insert the timing belt (2:50), align it with the bearing and drive pulley, and pull it through the small holes in the extruder assembly shown at 2:52. Note the orientation of the timing belt, is with the teeth inwards, unlike what is shown in the video. Pull on the timing belt to tighten it and secure it with zip ties. Then make sure the drive pulley is correctly aligned, orient it so that one set screw is on the flat part of the drive shaft, and tighten.

F. Attach the extruder motor (2:56-3:03)
- Find the extruder assembly, which is in its own separate plastic bag and made of black metal. In the same bag, you will find a very short M5 (I think) bolt which requires a hex wrench to tighten. As shown in the picture below, it will fit into the larger extruder assembly piece, which has the bearing attached to it as well. Make sure the bolt in that piece is all the way in so it can sit in the inset hex-shaped area in the bolt (mine wasn’t). You will also find a spring, which goes over the bolt and sits in the other side of the extruder assembly. Watch the video a few times from 2:58-3:00 to see how this all fits together.
- Find the extruder motor. Make sure that the teeth are at the top of the motor shaft (you may need to loosen the set screws to do this). Note: The set screws on this motor are NOT metric. You will have to borrow a tool or buy a non-metric hex wrench set to adjust the position of these screws.

- Find an M3 22mm screw in the extruder assembly and use it to attach the motor to the motor mount (note: orientation of the assembly is important. See picture). Make sure the power plug faces to the back for the motor.
- Find the next M3 15mm bolt in the same bag and attach the rear right of motor
- Squeeze the extruder assembly together and attach the front left of motor with the final M3 22mm screw. Note that there is no place for a fourth screw.
- Find the small brass holder for the bowden cable. Insert the bowden cable into it, and screw it into the front of the extruder assembly.
G. Attach the end stops and print bed (3:04-3:18)
- Find the end stop with the longest cord and the acrylic mount shown at 3:04. Get two M2 10mm bolts and two M2 nuts and attach the end stop to the acrylic piece. Use two T-nuts and two M3 8mm bolts to attach the assembly to the X-axis crossbar (that the extruder is mounted on). At this point I discovered I was short a couple of T-nuts.
 We have extras ordered for your kits.
We have extras ordered for your kits. - Find the last end stop (the z axis end stop) and acrylic mount shown at 3:10. Note that the orientation of the printer in the animation is backward — the back of the printer is facing you (you can see the power plug in the motor) and the front is away from you. This means that the end stop looks like it’s being mounted on the rear, right side of the printer but it actually belongs on the front, left side, as is visible at 3:15 in the video.
- Find the print bed, 4 M3 30mm bolts, 4 wing nuts, 4 regular nuts, and 4 springs. You also need 4 M3 nuts to secure the print bed above the spring. Attach the bolts to the metal bed with the regular nuts. Arrange as shown at 3:18. For orienting the print bed, the writing should go down and the power plug face to the back.
H. Assemble the electronics (3:21-4:00)
- Find the powerbox, electronics base (acrylic). Note the bright yellow sticker marking the switch between 110V and 220V.
 Before you do anything else, make sure the switch is all the way to the left!
Before you do anything else, make sure the switch is all the way to the left! - Find the 3 M3 10mm bolts. Position the power box as shown at 3:21. Hold it in place as you turn the assembly over to find the bolt holes (Note: I was only able to match it up to 3 hols and bolts, but the video shows 4).
- Find four M3 20mm bolts and place them through the bolt holes shown at 3:26, putting plastic pillars on them once they are through the holes. This is a tricky maneuver as they want to fall out as you re-orient the electronics base.
- Find the long (5mmx21mm) green circuit board and place it with the USB port facing out (away from the power supply) in the position of the bright green rectangle in the video at 3:27. Secure with nuts as shown.
- Find an M3 20mm bolt and M3 nut and move the video to 3:29. The assembly order in the video is difficult. It is much easier to slide the bolt through the hole and place the nut on the bolt at the very top.
 Then place the plastic piece and adjust until the nut is in the inset shown in the video. Now tighten the bolt, and the plastic piece will be tightened into place.
Then place the plastic piece and adjust until the nut is in the inset shown in the video. Now tighten the bolt, and the plastic piece will be tightened into place. - Follow the same procedure to attach the piece shown in green at 3:34, using two M3 20mm bolts, and the piece in green shown at 3:38. Note the orientation and shape of the pieces, in particular, make sure that the USB port is accessible.
- Find the switch and plug shown at 3:42 and attach them to the corresponding acrylic piece with two M3 10mm bolts and M3 nuts.
I. Wiring your power supply (not in video).
- Wiring your power supply is a very important thing to get right!! Although it is not described in the video, your printer comes with a piece of paper that shows the wiring. With careful attention, wire the power supply to the switch as shown. Have the instructor check this if you have any concerns. It will wreck your electronics if you get it wrong.
- Also attach the free (both ends unattached) black and red wires as indicated to V- and V+, respectively.

- Now you can attach the back to the electronics base, as shown at 03:45.
- Turn over your piece of paper to see the wiring for the board.
- Attach the grey cable for the display to the board, and attach the display to the electronics base as shown at 03:52.
- Attach the wires labeled X, Y, Z1, Z2 and E to the correct locations on the board. Be sure to attach the correct side of the wires, and orient them the correct way. You can see by shape, as well as the color ordering of the wires in the picture and in your board. Run the wires along the top of the board and out the big hole near the power supply.
- Find the wires coming out of the extruder assembly. Push them through the same big hole as everything else, and wire them up. Plug in the fan, and thermistor wires as well.
- Plug the hot bed wires into the hot bed (these are difficult to get in, but the clasp should be on top). Push them through the same hole as everything else. Plug in the bed thermistor.

- Three sets of wires on your board are screwed in instead of plugged in.These are the extruder heater wires, the hot bed heater, and the power supply. Take very careful note of where each goes.Use the small yellow standard screwdriver to unscrew these screws. You have to raise the screws quite a lot to get the wires in properly. You’ve done it right if, once you tighten the screws down, the wires won’t come out. Be sure to put the black (V-) and red (V+) wires from the power supply in the proper order.
- Plug in the end stops. On the board, they have labels like ‘X-axial limit switch’ (X end stop). Also plug the motor wires into the motors, and you should be all wired up.
- Do not attach the cover to your wire box, as you probably made at least one mistake.
- Also don’t do this yet, but eventually: You can use the wire wrap to wrap your wires. The picture of the printer on the Alunar site shows very nicely which wires you want to wire wrap together.

J. Prepare your mac for connection to your board
- Install the Ch44OG Driver (Serial adapter) website https://blog.sengotta.net/signed-mac-os-driver-for-winchiphead-ch440-serial-bridge/ and instructions if that doesn’t work after restart (for later versions of osx): https://tzapu.com/making-ch440-ch441-serial-adapters-work-under-el-capitan-os-x/
- Download Repetier Host
- The repetier software download website : http://www.repetier.com/download-now/
- In order to get your printer running, you will need to change a few settings. Use Command or Control P to open the printer settings. In the connection tab, set the Port to the serial port your printer will be using, set the Baud Rate to 115200, set the Transfer Protocol to Force ACII Protocol, and set the Receive Cache Size to 127. Also make sure that Use Ping-Pong Communication and Firmware sends OK after error are checked. Then go to the dimensions tab and fill in the correct dimensions for your printer (220 x 220 x 220 should work).
- Install the FTDI usb driver. Download website: http://www.ftdichip.com/Drivers/VCP.htm
- Begin testing. When everything works, then cover it :).
instruction how to work from scratch for beginners and dummies, how
looks likeThree-dimensional printing has become increasingly introduced into our daily lives. Thanks to new technologies, it has become possible to easily print from a small detail to a large building. The range of products is also pleasing - today you can find a lineup that includes both affordable devices and more expensive ones. But how to work with a 3D printer? This is a completely normal question that any beginner will have, it is for this reason that we will try to answer it as simply and accessible as possible.
What is a 3D printer and how does it work?
The 3D device consists of the printer itself and a computer that controls all processes. The principle of operation of such a design is to create 3D models by superimposing layers of liquid material. There are a large number of printer models - from large industrial ones to compact ones, but they all have the same principle of operation and component parts:
There are a large number of printer models - from large industrial ones to compact ones, but they all have the same principle of operation and component parts:
- Extruder - the print head through which the thread passes. The head heats the thread to a semi-liquid state and evenly supplies the material to the working surface.
- Work surface - a printing platform on which a 3D model is formed.
- Motors - mechanisms responsible for the accuracy of movement and speed of printing.
- Sensors are electronic devices that limit moving parts to specified coordinates.
- The frame is the structure that connects all parts of the printer.
How a 3D printer works: features
Work with the aim of building a three-dimensional model begins with a sketch, which is created in a special program. After that, the software independently generates a plan for the movement of the print head and a print sequence. The 3D model is reproduced by strongly heating the plastic and distributing it evenly.
3D printers are used in many areas. Let's list some of them:
- Architecture - creation of models of buildings.
- Medicine - dental prosthetics, making models of organs for study.
- Construction - production of houses using 3D printing technology.
- Education - a visual aid for learning 3D printing.
- Automotive - creation of tuning parts, prototype layouts and other products.
This is a small list of industries where 3D printing is actively used. Today, almost every entrepreneur and just an enthusiastic person can afford a printer.
The following printers are distinguished by design features:
- RepRap - self-reproducing printers that can create their own copies.
- DIY-kit - the device comes disassembled with instructions, the assembly of which will take a sufficient amount of time.
- Completed - Models are delivered assembled and ready to use.

- Commercial and Industrial - devices capable of printing metal, concrete, polymers and other materials.
How to use a 3D printer: tips for beginners, where to start
Mastering the technique of 3D printing is not difficult if you follow the recommendations and tips. Especially for those who plan to learn the basics of 3D modeling, an up-to-date list of questions and detailed answers to them has been prepared.
Printer Installation
To begin, you will need to carefully unpack the box and remove any stops. The next step is to install the printer on the surface using the building level. This will allow you to place the device as evenly as possible, which will provide better printing.
Note. Some 3D printers come with a level for installation.
Next, you will need to connect the printer to your computer and install the necessary drivers. The software disc comes with the 3D device.
Preparation for work
To get started, you need to calibrate the working surface - without this, printing quality products is impossible. This process is carried out automatically or manually. The attached instructions have detailed information on how to perform manual calibration.
This process is carried out automatically or manually. The attached instructions have detailed information on how to perform manual calibration.
Extruder patency test
The next important step is setting up the extruder. First of all, you will need to check its nozzle. If the printer has already been used, the nozzle should be cleaned of solidified particles that will interfere with the throughput of the material. Refueling the 3D printer The thread is fed into the extruder directly from the spool. But there is one caveat - for this you must first warm it up. To thread the thread, you will have to make a small effort in order to loosen the presser mechanism.
Working with models
Models can be created using a variety of 3D modeling programs. The process of manufacturing three-dimensional parts is creative, requiring careful preparation. The better and more detailed the model is drawn, the better the 3D layout will be at the output.
Start printing
After creating the model in the program and preparing the printer for work, you need to send the file for printing and wait for the result. The print speed varies depending on the printer model and specifications, as well as the media used.
The print speed varies depending on the printer model and specifications, as well as the media used.
Processing the finished product
3D printed products usually do not please the user with an ideal appearance: the parts have an uneven surface. But this is typical for models of 3D printers on FDM, SLA and DLP devices, which are distinguished by higher print quality. Owners of FDM printers should not despair - a simple processing of products will give products an attractive appearance and make the surface smooth.
Several powerful ways to post-process 3D printed parts:
- Mechanical - carried out by sanding the surface with sandpaper or a special sponge for grinding.
- Chemical - Surface treatment with aggressive solvents such as acetone and dichloroethane.
- Mixed - In this case, the above two processing methods are used.
What are the possible errors and how to avoid them?
Even a novice can master the technology of 3D printing, but, despite this, the production of the first products causes excitement for the user. Simple operation, detailed instructions and recommendations on the Internet will allow everyone to deal with almost any printer model. But there are a few useful life hacks, the knowledge of which will help you avoid typical beginner mistakes:
Simple operation, detailed instructions and recommendations on the Internet will allow everyone to deal with almost any printer model. But there are a few useful life hacks, the knowledge of which will help you avoid typical beginner mistakes:
- Calibrate and test the 3D printer before starting work.
- Be sure to use the correct file extension for quality printing.
- Do not remove the finished product from the printer immediately after it has been processed: this may damage the part and cause defects.
- If errors occur during the 3D printing process, try restarting the device - this usually helps.
- If restarting the printer still does not help, try changing the settings or re-entering the model.
- When assembling the 3D printing devices, follow the enclosed instructions carefully.
- Use only the correct materials for your 3D printer.
- Subscribe to useful 3D printing channels and articles.
Following the above tips will allow you to set up your 3D printer, get it ready for operation and, most importantly, print your first 3D products. Choose a model according to your budget and capabilities, and it will not be difficult to master the basics of 3D modeling and get the first details if you follow the instructions and recommendations.
Choose a model according to your budget and capabilities, and it will not be difficult to master the basics of 3D modeling and get the first details if you follow the instructions and recommendations.
- March 21, 2021
- 7490
Get expert advice
Instructions for setting up all the mechanics of a 3D printer: from belts to speeds
The quality of the printed models directly depends on the mechanics of the printer, namely on its correct settings. Any elements of the printer wear out over time, so the printer must be set up at least once every 5-6 kg of printed filament. With the help of the short instructions described in this guide, you can quickly and easily set up the mechanics of your printer: belt tension, motor current, motor steps, acceleration, jerk and speed.
Mechanics includes
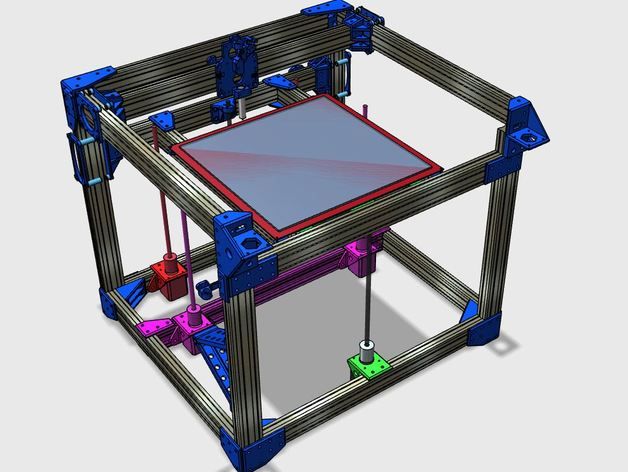
3D printers of any design always contain the same things: Axes and rails along which the elements of the printer move and motors with belts that set these elements in motion. In a classic printer design, there are at least 3 motors (one for each axis), 3 rails (one for each axis) and an electronics board that controls the motors. The latter can hardly be called part of the mechanics, but since it controls the engines, it also indirectly affects the quality of the model.
In a classic printer design, there are at least 3 motors (one for each axis), 3 rails (one for each axis) and an electronics board that controls the motors. The latter can hardly be called part of the mechanics, but since it controls the engines, it also indirectly affects the quality of the model.
Printing defects due to mechanical problems
Before changing anything in the printer, you need to decide what exactly needs to be configured. Often defects are visible visually. Our blog has an article about most printing defects, which details the reasons for their occurrence. The following is a list of defects and what element of mechanics they are associated with:
-
Layer shifting - Belts, Motor current, Guides
-
Ringing - Guides, Speed
-
Incorrect model geometry - Guides, Motor steps, belts
As you can see, all the above problems do not interfere with the printing process itself, but the result leaves much to be desired. Sometimes mechanical errors can completely stop the printer from working. Therefore, it is better not to take the situation to extremes and, if any problems arise, immediately start checking and configuring the 3D printer.
Sometimes mechanical errors can completely stop the printer from working. Therefore, it is better not to take the situation to extremes and, if any problems arise, immediately start checking and configuring the 3D printer.
How to save settings
To fix some defects, you need to change the printer software settings. Therefore, before adjusting the mechanics, it is necessary to understand how to properly store the settings inside the printer. There are 3 ways to do this:
All settings are located in the corresponding menu of the printer
Depending on your firmware, this manual will indicate code sections for MARLIN firmware in the configuration.h file
We first enter the parameters into the printer and then store them in EEPROM - the internal memory of the microcontroller. Or paste all the necessary settings at the beginning of GCODE. To learn how to do this, read our article on working with GCODE and creating macros.
To save to EEPROM, you need to send the printer a command to change some value (which can also be inserted into the initial GCODE), and then send the M500 command (save the current settings to permanent memory). The EEPROM function must be enabled in the firmware, for this you need to remove two slashes in the line:
The EEPROM function must be enabled in the firmware, for this you need to remove two slashes in the line:
//#define EEPROM_SETTINGS
Whichever option you choose, you should be careful when using any commands. You will not be able to harm the printer in any way when changing the settings, but if you make a mistake, you will have to look for the cause of possible further problems for a long time.
Setup instructions
Now you can start setting up the printer itself. If you decide to set several parameters at once, then it is better to use the order of adjustments as in the article, since some of the settings are related to each other and if you use the wrong order, adjusting one element of the mechanics will override the settings of another element. For example, you should not adjust the motor steps before tightening the belts, as changing the length of the belts will change the "true" steps per millimeter of the motors. Also, before setting up, you must make sure that there are no backlashes in the printer frame, tighten all belts.
Belts
The first thing to start setting up the printer is the belts. They directly affect the geometry of the model and, when pulled too much, they cause a lot of problems: displacement of layers, changes in geometry, ripples. First you need to make sure the belt is intact. To do this, look at the entire belt, especially the areas where the belts bend. If the belt has outlived its usefulness, then you can see a section of the belt where the distance between the teeth has greatly increased and a metal wire (cord) is visible between them. This means that it's time to completely change the belt.
Broken belt with broken cords
If the belt is intact or you have already replaced it, then you can proceed to the next step. Depending on the design of your printer, you need to move the roller through which the belt passes. The tension should be such that the carriage or table moves effortlessly, but at the same time, when moving quickly, the belt should not slip the teeth on the motor gear. Adjust the tension of the belts on each axis of the printer using this method.
Adjust the tension of the belts on each axis of the printer using this method.
Tip: if your printer came with a belt tensioner in the form of a spring attached to the belt itself, remove it. Due to the flexibility of this tensioner, printing defects will occur, such as protruding corners on the model. It is better to adjust the belt without using this tensioner.
Belt tensioner
Current motors
As we know from the school physics course, the power of the engine depends on the voltage and current strength. Since the voltage on all printer electronics is the same everywhere, the only thing that can be changed is the current on the motor. More precisely, it should be said the maximum current that the driver will supply to the motors. To change this limit, you need to climb inside the case and find the printer board. On it you will see the printer driver. We are interested in a small potentiometer on the driver itself (in the picture below it is indicated as a tuning resistor).
Potentiometer location example on driver
For adjustment, you will need a voltmeter and a small Phillips or flathead screwdriver. Before proceeding further, it is necessary to calculate the maximum current supplied to the motors. Different formulas are used for different drivers, the most popular ones will be listed in the table below:
| Driver name | Formula | Explanations |
| A4988 | Vref = Imax * 1.25 for R100 | To understand which formula to use, you need to find a resistor with the signature R100 or R050 on the driver. They are located next to the driver chip. |
| DRV8825 | Vref = Imax / 2 | |
| LV8729 | Vref = Imax / 2 | |
| TMC2208 TMC2100 TMC2130 | Vref = Imax * 1. | One formula for all drivers |
 41
41 The value of the maximum current (Imax) depends on the motor controlled by the driver. This can be found in the engine specification or on the sticker on it. The following are the currents for the most popular motor models:
17HS4401 - current 1.7 A
17HS8401 - current 1.8 A
17HS4402 - current 1.3 A
Substituting the value into the formula, we get the Vref value for the maximum current supplied to the motor. But at this value, the engine will get very hot, so the resulting Vref value must be multiplied by 0.7. For example, for a motor with a maximum current of 1.5 A and a TMC 2208 driver:
Vref=1.5*1.41*0.7=1.48V
Now the resulting value can be used when configuring on the printer itself. To do this, disconnect the wires going to the motors, turn on the printer and place one voltmeter probe in the center of the trimmer, and the second probe to the negative terminal on the power supply (you can also use the negative terminal on the printer board and the contact on the driver, labeled as GND). You will see some value on the voltmeter screen. Turn the trimmer clockwise to decrease the Vref value and counterclockwise to increase it.
You will see some value on the voltmeter screen. Turn the trimmer clockwise to decrease the Vref value and counterclockwise to increase it.
Attention: you should not specify a Vref value higher than the maximum calculated for your engine! Otherwise, the engine will soon break down!
Once you have adjusted the value on the drivers, you can turn off the power to the printer, connect the motor wires, and put the case back together. This completes the driver setup.
Motor steps
When setting up motor steps, you will need a ruler. For convenience, you can use the program Repetier-Host. The adjustment for each of the three axes occurs according to the same algorithm:
-
Set the caret to zero coordinates (Autohome or G28)
-
Move the carriage some distance
-
We measure how far the carriage has traveled
-
We calculate the correct number of steps per millimeter using the formula:
True steps per millimeter = current steps per millimeter * reported distance / distance traveled
For example, if the printer was set to 100 steps/mm, we tell the printer to move 80mm and the printer travels 87.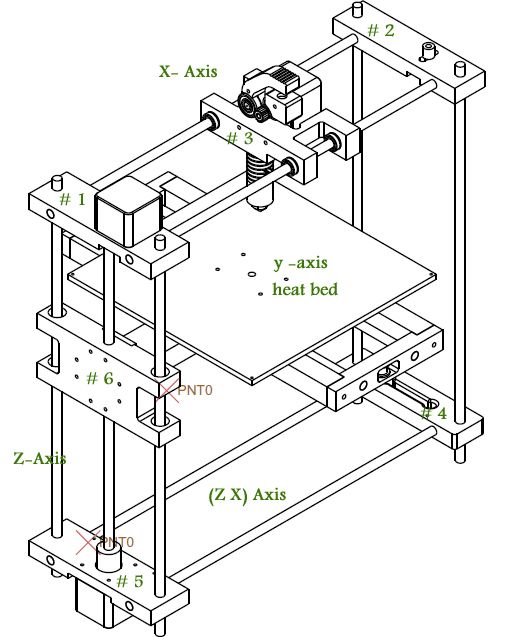 5mm. Then the correct steps per millimeter would be 100 * 80 / 87.5 = 91.42 steps/mm. For the convenience of measurements, you can fix a ruler on the table, and a thin object, such as a needle or pin, on the carriage. Then it will be possible to accurately measure the distance traveled. The extruder uses a partially different algorithm to measure distance:
5mm. Then the correct steps per millimeter would be 100 * 80 / 87.5 = 91.42 steps/mm. For the convenience of measurements, you can fix a ruler on the table, and a thin object, such as a needle or pin, on the carriage. Then it will be possible to accurately measure the distance traveled. The extruder uses a partially different algorithm to measure distance:
-
Inserting plastic into the extruder
-
Cut it right at the outlet
-
We give the printer a command to stretch the plastic a certain distance (at least 100 millimeters)
-
Cutting plastic again
-
We measure the length of the resulting piece of plastic
-
We use the formula from the previous algorithm
Next, the settings data must be inserted into the firmware in the line:
#define DEFAULT_AXIS_STEPS_PER_UNIT {X,Y,Z,E0}
X,Y,Z and E0 should be replaced by the steps per millimeter for each of the axes, respectively. Otherwise, you need to insert this line into the initial GCODE:
Otherwise, you need to insert this line into the initial GCODE:
M92 Ennn Xnnn Ynnn Znnn
Instead of nnn in each of the parameters, you must substitute the steps per millimeter for each axis. If you want to adjust the steps only for not all axes, then you can remove unnecessary parameters.
Acceleration
This parameter is responsible for the rate of change of speed. That is, how fast the printer will change its speed. This affects the nature of the movement of the hot end relative to the table. If the acceleration is too small, then the printer will print slowly, if it is too large, then the outer surface of the model will have visual defects: fading waves will be visible near each of the corners, as in the picture below.
To set up acceleration, you need to follow simple steps:
-
Cut a model of a standard test cube with a wall thickness equal to one nozzle diameter, without filling and top layers, bottom 2-3 layers;
-
Open GCODE file in notepad;
-
Find the G28 command at the very beginning and insert the line data after it:
M201 X5000 Y5000
M204 P500 T500
-
Save the changes, print the model according to the received GCODE and note at what parameters P and T it was printed;
-
Open the same GCODE file and change the P and T values on the second line, adding 500 to each;
-
Repeat steps 4-5 at least 3 times;
As a result, you will get several test cubes, some of which will show waves at the corners. Choose the cube that is printed with the highest P and T parameters, but that no waves can be seen on it. The number in parameter P will be the desired acceleration value. To save this value, you need to find 2 lines in the firmware:
Choose the cube that is printed with the highest P and T parameters, but that no waves can be seen on it. The number in parameter P will be the desired acceleration value. To save this value, you need to find 2 lines in the firmware:
#define DEFAULT_MAX_ACCELERATION {X,Y,Z,E0}
#define DEFAULT_ACCELERATION {nnn}
Instead of X and Y, you should put an acceleration twice as high as found earlier. And instead of nnn, you need to put the acceleration value found earlier. Otherwise, you need to insert a line in the initial GCODE:
M204 Pnnn Tnnn
In the parameters P and T, you need to put the value of the found acceleration. After that, the acceleration setting can be considered complete.
Jerk
A jerk indicates the speed with which to start accelerating. It affects the model in a similar way as acceleration: it creates ripples around the corners of the model. But it also increases the protrusion of the corners if the jerk is too small. The jerk setting is also similar to the acceleration setting:
The jerk setting is also similar to the acceleration setting:
-
Cut a model of a standard test cube with a wall thickness equal to one nozzle diameter, without filling and top layers, bottom 2-3 layers.
-
Open GCODE file in notepad
-
Find the G28 command at the very beginning and insert the line data after it:
M205 X5 Y5
-
Save the changes, print the model according to the received GCODE and note at what X and Y parameters it was printed
-
Open the same GCODE file and change the X and Y values on the second line, adding 2 to each
-
Repeat steps 4-5 at least 3 times
As a result, you will get several cubes. Find a non-rippled cube printed at the highest X and Y settings. This will be the jerk value for your printer. To save them, you need to find the line in the firmware:
#define DEFAULT_XJERKnnn
#define DEFAULT_YJERKnnn
It is necessary to substitute the jerk values for the X and Y axes, respectively. Otherwise, you need to substitute the command in the starting GCODE:
Otherwise, you need to substitute the command in the starting GCODE:
M205
Instead of nnn, you need to substitute the jerk value found earlier. This completes the jerk setting.
Speed
In fact, there are many different speed parameters, the values \u200b\u200bof which vary greatly. Let's take a look at the main ones:
This parameter is responsible for moving the nozzle without extruding plastic. The value is in the range from 80 to 120 mm/s. Limited only by the maximum speed at which the motors can rotate. Does not affect the model
This speed is important because it indirectly affects the adhesion of the model to the table. Usually lies between 15 and 30 mm/s
-Print speed of inner walls
Usually set to about 60 mm/s, it only affects the strength of the model. Depends on the maximum amount of plastic that the extruder can push through the nozzle
-Speed of printing outer walls
Usually about half the printing speed of the inner walls (30 mm / s).