Arduino 3d printer projects
7 of the Coolest 3D Printed Arduino Projects
You can make some really cool things with an Arduino. And you can make some really cool things with a 3D printer. What do you get when you use them both? Some extremely cool things!
Here are seven projects that you can 3D print and power with an Arduino (and, as a bonus, a 3D printer that you can make with an Arduino).
With 3D printing, you can take your robot builds to the next level. Take, for example, this quadruped robot that looks like something from a sci-fi movie.
It’s built from 38 3D printed parts and is controlled using an old PlayStation controller. Each leg is equipped with three servos, giving it three degrees of movement: forward and back, up and down, and a bend at the joint. What this all means is that this four-legged robot can move in any direction.
With most of the hard coding work done for you, it’s just a matter of assembling the robot and uploading the correct files. But of course, this is easier said than done—luckily, the project guide (linked above) has everything that you need to build this awesome creation.
3D printing Arduino projects have pushed electronic hobby makers to make even more amazing designs and this cyborg prosthetic hand is one of them.
The 3D-printed arm has quite a nice design. On the outside, it looks like prosthetic arms that we’ve seen in real life, while on the inside its hollow body allows room for electronics. The Arduino Uno powers this creation and following the assembly of the 3D printed parts, you just need to upload the code from the project page.
Other parts you will need to include are some servos, wires, and nylon string. The latter is used in this case to move the fingers. It’s these kinds of projects that might just make a difference in the world!
Inspired by the human body, this creator set out to design the ultimate 3D printed muscle and bones set. When slotted together, these artificial muscles and supporting bone structures can move with incredible flexibility. Because it's designed to be modular too, you can create whatever robot you can imagine out of these parts!
Each 3D printed muscle is shaped like the omega symbol and can easily slot together with identical shapes, supported by 3D printed bone structures.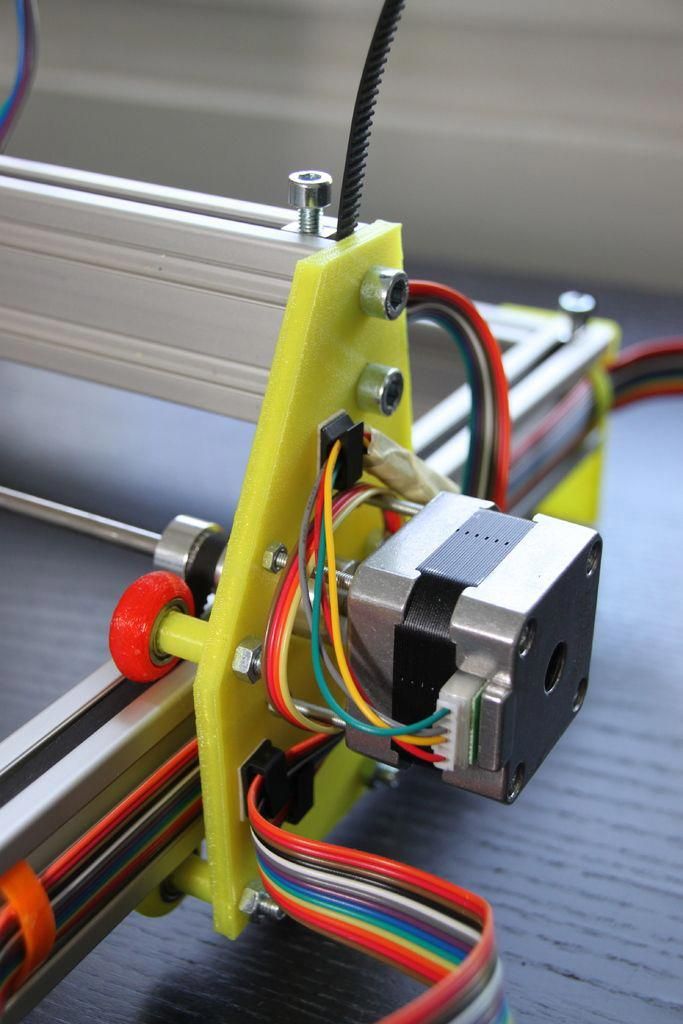 Running through all these shapes are thin plastic tubes, essentially creating a pneumatic system that can be controlled with a microcontroller.
Running through all these shapes are thin plastic tubes, essentially creating a pneumatic system that can be controlled with a microcontroller.
Included in the project guide is a tutorial for an air pressure controller. Use this alongside your Arduino to build a robot with up to 90 degrees of rotation. With a little creativity, it's a project that has a lot of possibilities!
Two of the most popular things in the geek world right now are 3D printing and drones. Why not combine the two to make a 3D-printed quadcopter drone?
By using an Arduino Nano, several affordable PCPs, a NRF24 for radio transmission, alongside motors, propellers, and a number of other parts, you can build your own little quadcopter. You might have some of the parts you need hanging around if you have an Arduino starter kit, but the rest can be bought online with ease.
You'll need to do a lot of wiring to get everything attached to the frame, but creator Yue Beifong will walk you through it with pretty clear explanations of what you need to do. The project includes the 3D printer files, so you'll just need a printer to get everything to work.
The project includes the 3D printer files, so you'll just need a printer to get everything to work.
For this project, you'll need more parts than the previous two, including a bunch of LEDs, capacitors, an oscillator, transistors, and an AC mains switch and connector.
The result, however, is one of the coolest lamps that we have seen.
Once you've collected the various parts, you'll need to use some basic electronics skills to wire up the 3D printed double-helix to a rotating motor, like one from a microwave. The full guide (linked above) takes you through each step in detail. When you're done, you’ll have a rotating strand of glowing DNA!
A word of caution: because this one involves mains power, be extra careful when you're working on it!
Pip-Boy from Fallout 4 has been a popular DIY build ever since fans got a first look at it!
It requires quite a few unique parts, including a gyroscope, power pack, a capacitive display with driver board, flashlight, pressure sensor, methane sensor, and a multi-part 3D printed case.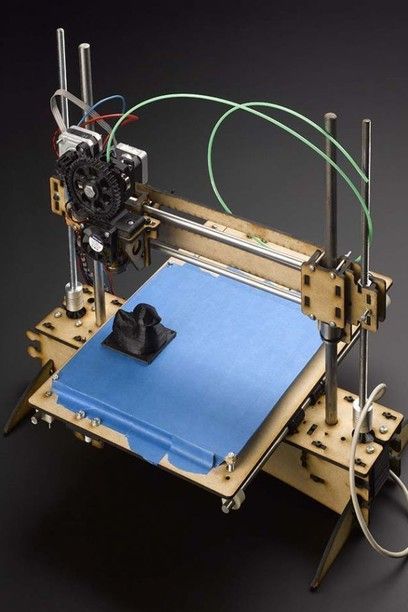
You'll need to make a custom I/O board to get this project working, but in the detailed guide (linked above), the steps for making it are very clear. If you are after a later version of the Pip-Boy, you can also have a look at this YouTube video which covers a beautiful 3D printed design with great painted details.
It's a pretty involved project, but it absolutely can't be beaten as a Halloween costume, cosplay accessory, or conversation piece!
If you're trying to build your own personal makerspace, a CNC mill is a great addition. The project page notes that it's accurate enough to cut and drill circuit boards, so it should be good for any milling project you want to take on. It requires a large number of 3D printed parts, so you may want to consider using a printing service, but it wouldn't be too difficult to print your own.
You'll also need quite a large selection of parts, including a lot of fasteners, some bearings, a relay module, and DC connector, some metal parts for the surface, and an Arduino to run everything.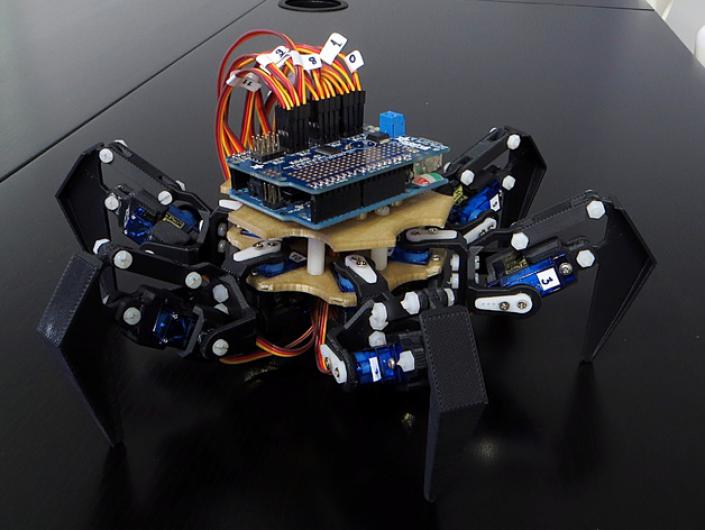 It's quite a project, but then again, having your own CNC mill is quite a handy thing!
It's quite a project, but then again, having your own CNC mill is quite a handy thing!
Don't Have a 3D Printer? Build One!
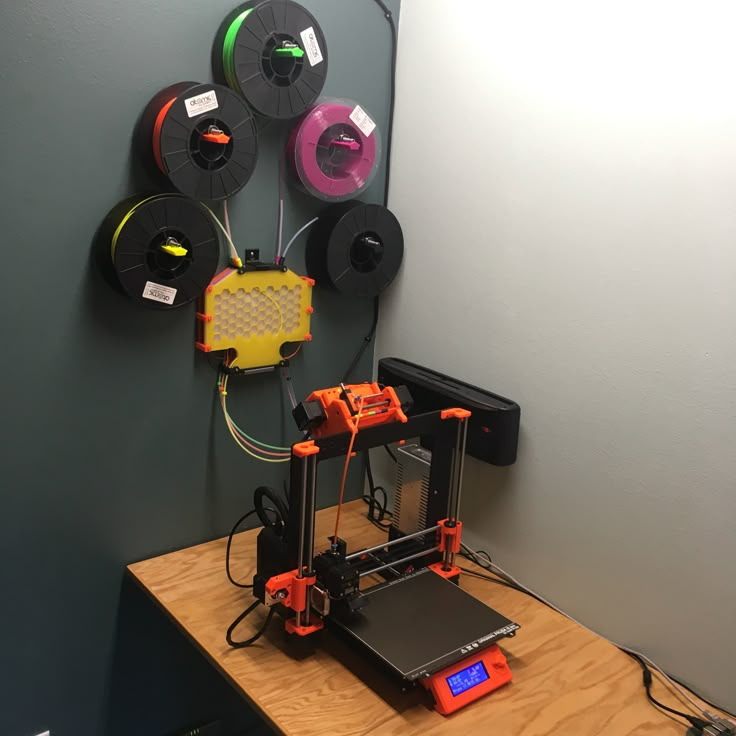
If you don't have a 3D printer, there are still a few options for getting the 3D printed parts you'll need for these projects. You could borrow a 3D printer, use one at a local makerspace, or use a 3D printing service. Alternatively, you can even build an Arduino-powered 3D printer for $60!
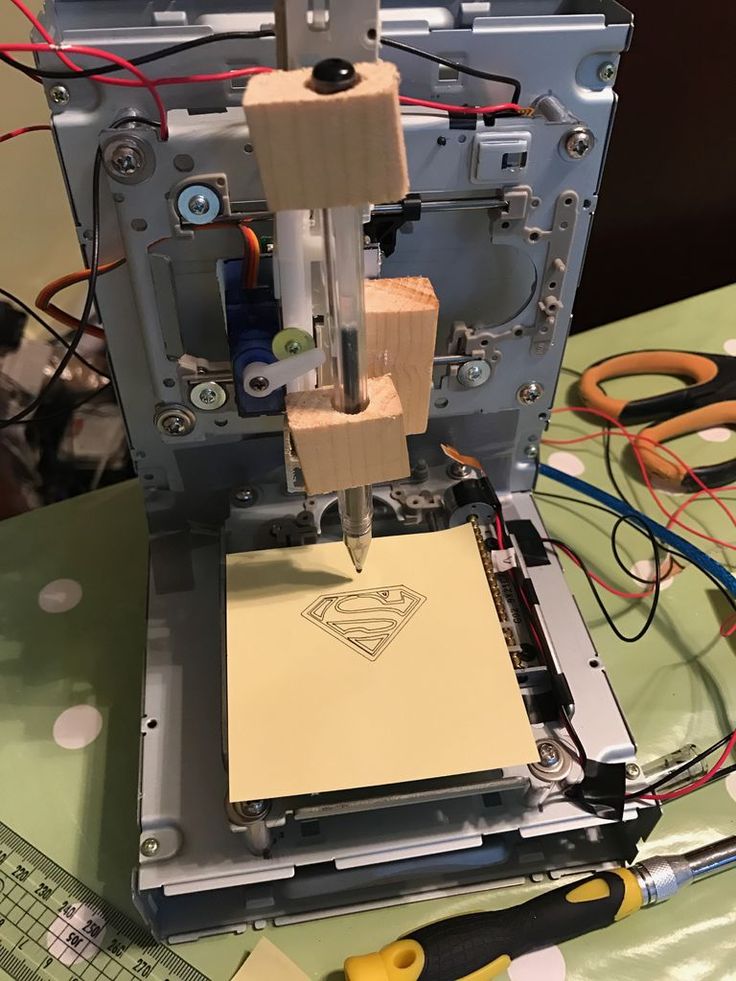
The EWaste 3D Printer is a micro printer and might not be big enough to print the parts for some of the larger projects above. But it's a really great home project that is affordable and environmentally conscious, as it uses mostly recycled computer parts.
You'll need a couple of old CD or DVD drives, a floppy disk drive, a small stepper motor, a power supply, an extruder, and a few extras, but overall it’s a surprisingly simple project.
You'll need to do quite a bit of calibrating and basic electronics work, but the end product is fantastically functional for what it's made out of.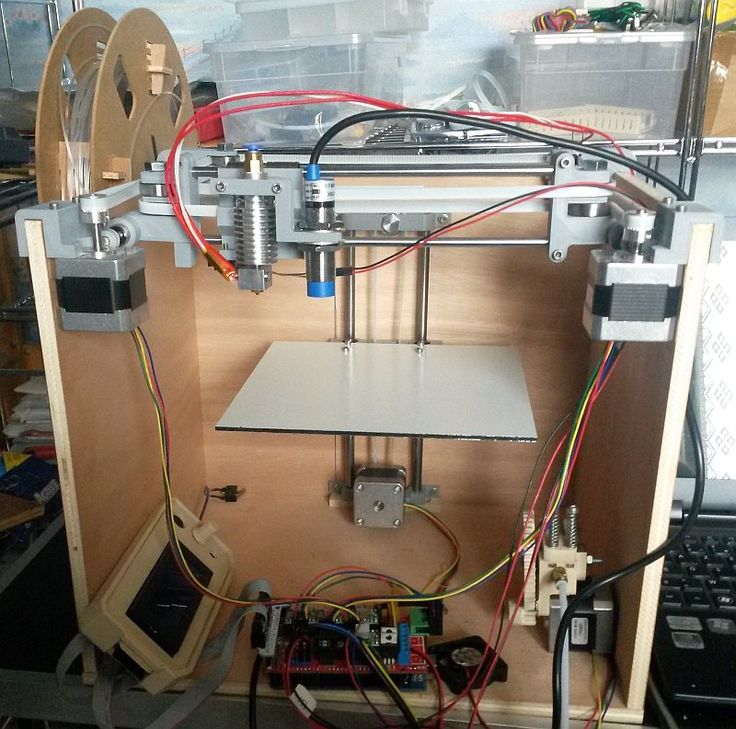
Build Your Next Arduino Project with 3D Printing
Combining 3D printing and Arduino is a no-brainer, and the projects above should give you a good idea of the limitless potential that it provides. Whether you have your own 3D printer, you use someone else's, or you use a 3D printing service, you can build your own project from start to finish.
💾 Best STL files 3D printed for Arduino & Raspberry Pi・Cults
💾 Best STL files 3D printed for Arduino & Raspberry Pi
Download 3D files of accessories for Arduino & Raspberry Pi
Discover a selection of the best STL files to use with a 3D printer in order to create great projects coupled with an Arduino or Raspberry Pi card. Turn the corner and bring your 3D printing to life with electronic components!
Iron Man MK6 MK 6 Suit
Free
Han Solo in Carbonite - Raspberry Pi 2/B+ Case
Free
The Animated Pixel Lamp
Free
BCN3D MOVEO - A fully OpenSource 3D printed Robot Arm
Free
SMARS modular Robot
Free
Terminator - ARRIVAL - by SPARX
Free
DIY 3D Printed Dremel CNC
Free
Poppy Humanoid
Free
DIY Alien vs.
 Power Loader fight with LED lights
Power Loader fight with LED lightsFree
Gyro Winder / Watch Winder
€2.50
RGB LED Lamp
Free
Terminator – THE FACTORY - by SPARX
Free
Arduino Uno Snug Case
Free
Raspberry Pi 3 (B/B+), Pi 2 B, and Pi 1 B+ case with VESA mounts and more
Free
Proteus Solder Station - 80mm/120mm fan
Free
Snes Mini Raspberry Pi
Free
SMARS V4 vertical Ultrasonic
Free
Bumper for Arduino Uno Clone
Free
Malolo's screw-less / snap fit Raspberry Pi 4 Model B Case & Stands
Free
Guardian Robot Hackable – Bottom Remix
Free
LED bridge lamp
Free
CNC Machine
Free
Raspberry Pi 3 (2 or B+) case
Free
Shovel DLC for SMARS
Free
PropMaker LightSaber
Free
Arduino Mega 2560 Snug Case
Free
UFO Abduction Lamp with blinking lights
Free
3D Printed Case for Arduino Uno, Leonardo.
Free
Arduino Uno R3 Snug Case
Free
RC Soviet tractor DT-75 Kazakhstan (1\10 scale)
Free
Otto DIY build your own robot
Free
Triple A connector + connector extender for SMARS
Free
OctoPrint Raspberry Pi Rig 3.5" PiTFT Touch Display
Free
Arduino box
Free
3A batteries mod for SMARS
Free
BOARDUINO – ARDUINO ALL IN ONE BREADBOARD STAND
Free
SMARS QUAD MOD
Free
Mini plotter (CNC Plotter) Arduino
Free
Raspberry Pi 3 B+ enclosure
Free
Arduino Mega 2560 holder
Free
7in Portable Raspberry Pi Multi-Touch Tablet
Free
Kame: 8DOF small quadruped robot
Free
Malolo's screw-less / snap fit Raspberry Pi 3 Model B+ Case & Stands
Free
Raspberry Pi Pipboy 3000 MKVI
Free
Twitch Drone Chassis for ZeroBot
Free
Particle Raspberry Pi Case
Free
Bubble Maker
Free
Magnetic levitating lamp
Free
Back to the Future Jules Verne Time Train with lights and smoke
ARDUINO UNO PORTABLE LAB CASE
Moving T-800 Terminator Skull
Malolo's screw-less / snap fit Raspberry Pi 3 Model B+ Case & Stands
Here is our selection of the best STL files for Arduino & Raspberry Pi, all these accessories are from the 3D file library Cults and are perfectly 3D printable.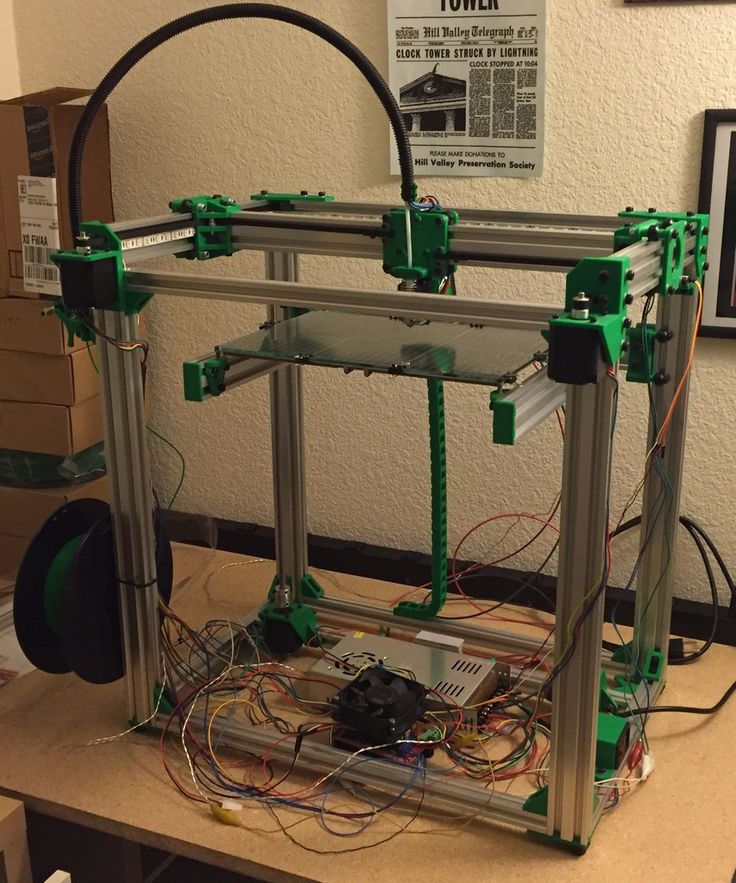
This collection includes free and paid 3D files of accessories to use with your Arduino or Raspberry Pi card. The many 3D models were created by our community of members 3D designers but also big fans of electronics and Do It Yourself. You will find here many projects ranging from simple storage for your card to the most incredible robot. There are, for example, automated robotic arms, smart cars, stopwatches, games, musical instruments, robots, etc.
Just download 3D models and integrate your Arduino or Raspberry Pi card into it. Installation instructions and the code for using the electronic component are provided. This necessarily requires more work than a simple object 3D printed, but you will have the real satisfaction of having successfully completed a project, of having coded it and of being able to really make it work.
Cheap Arduino 3D Printer||Arduino-diy.
 com
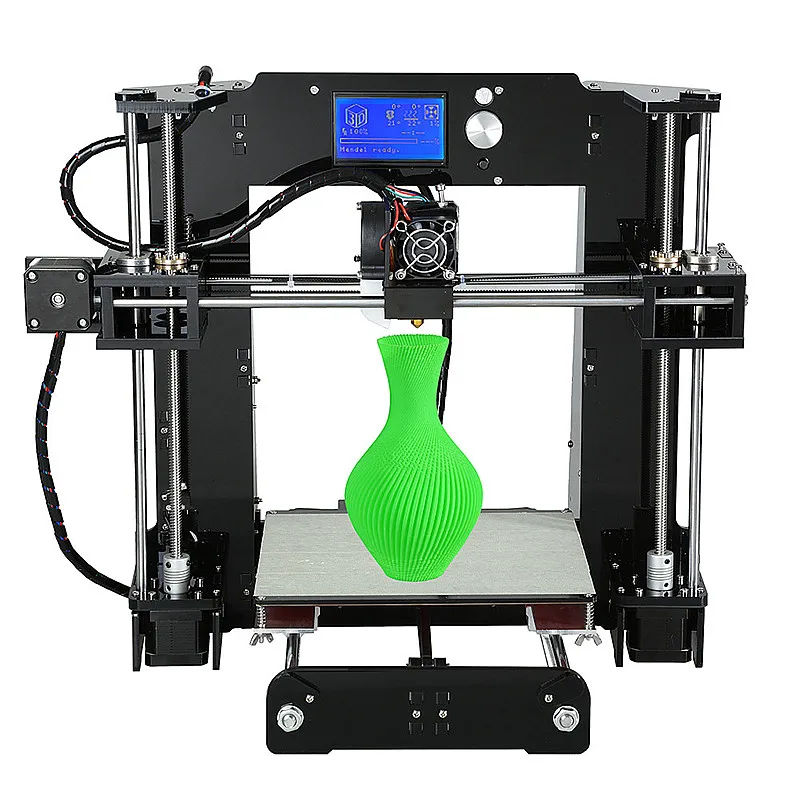
com This article describes the construction of a 3D printer that costs around $60-70 (probably the cheapest concept in the world).
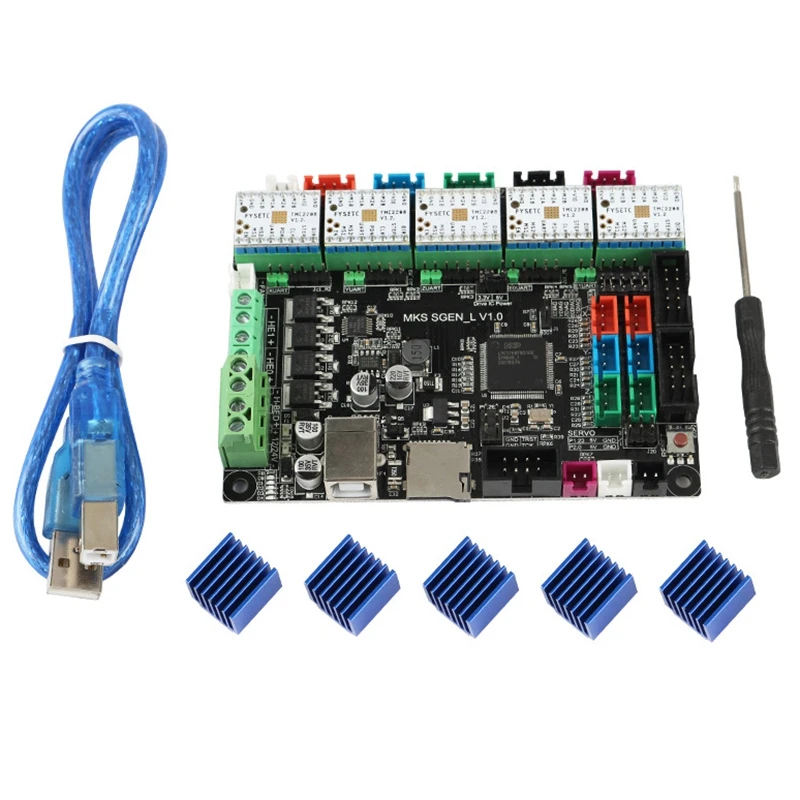
This 3D printer works with the cheapest motors on the market - 28Byj-48, Electronics - Ramps 1.4 controlled by Arduino.
The author of the project is a 16-year-old guy from Germany.
3D printer specifications:
Working space: 10x10x10 cm;
Speed: 20 mm/s;
Resolution (accuracy): 0.2 mm.
P.S. Under each section, in accordance with the table of contents of the article, photos are posted as a visual instruction
Mechanical part
MDF boards:
-1x 30x34 cm (Base).
-2x 6x4 cm.
-1x 34x6 cm.
-1x 15x4 cm.
- 2 GT2 pulleys + 1 m GT2 timing belt.
-10 bearings 624.
-1 pulley Mk8 for drive.
-1 PTFE tube.
Smooth rods for guides with a diameter of 8 mm:
- 2, 22 cm long.
- 4 x 17.5 cm long.
Local hardware store:
- 1 shaft with M5 thread, which you will cut into 2 pieces.
-2 M5 hex nuts.
- 8 screws M3x16 mm.
-6 screws M3x 25 mm.
-4 screws x M4x45 mm.
-2 screws M4x60 mm.
-4 screws M4x20 mm.
-20 M4 hex nuts.
-10 M3 hex nuts.
-12 small screws.
Electronics
-1 Arduino Mega 2560 board + Ramps 1.4 + 4 A4988 stepper motor drivers.
-4 stepper motors 28byj-48.
-3 optical limit switches.
-1 Nema 17 stepper motor (we also order from Ali or Ebay. Such drives cost about 10 dollars).
Extruder tip:
-1 E3D-V5 Aliexpress extruder
or more expensive but with cooling
-1 E3D-V6 Aliexpress extruder.
Knots to be printed on a 3D printer
Download the latest versions of 3D models of units to be printed from the link: Thingiverse
.
2 "Z-Motor" parts
2 "Y-End" parts
2 "X-End" parts
1 "X-Carriage" part
1 "Motor" part
1 "Hotend" part
1 piece "Hotend Clamp"
Download mechanism for extruder here: Thingiverse.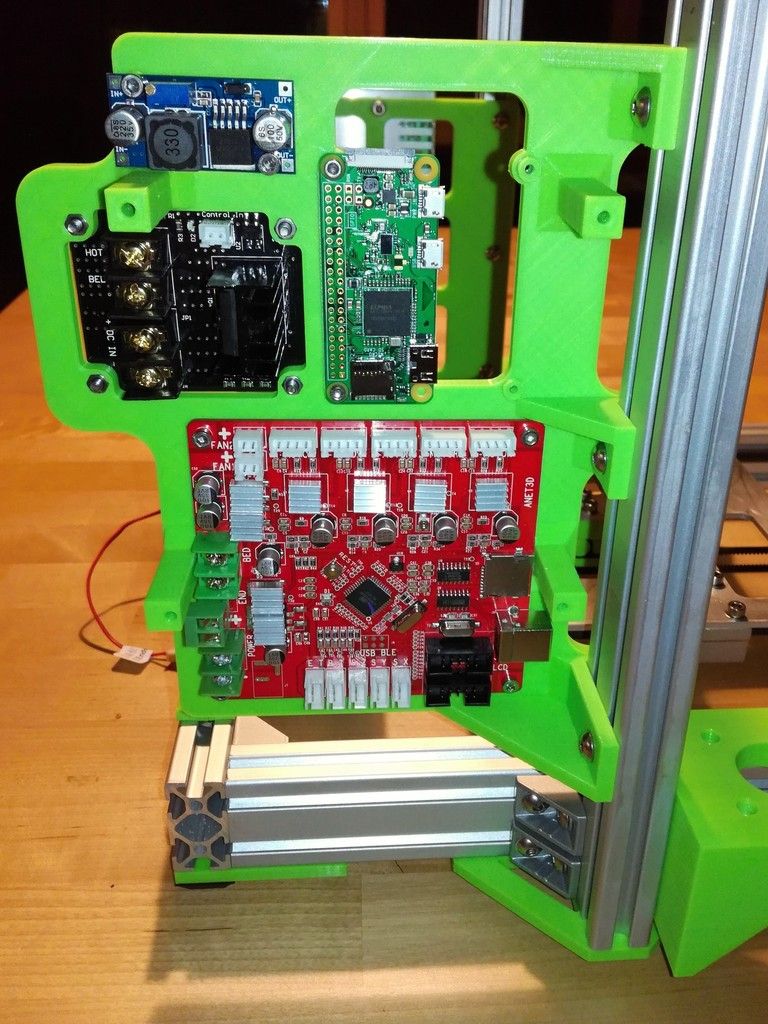
28BYJ-48 Stepper Motor Modification
In order to convert the 28BYJ-48 stepper motor from unipolar to bipolar, you need to open the plastic cover.
Then remove the red cable and open the contact track from it as shown in the figure.
Now at the other end is the output that you will connect to the Ramps, arrange the pins as follows:
blue--yellow--orange--pink
With this little modification, you can connect these motors directly to the pins provided on the Arduino Ramps 1.4 shield
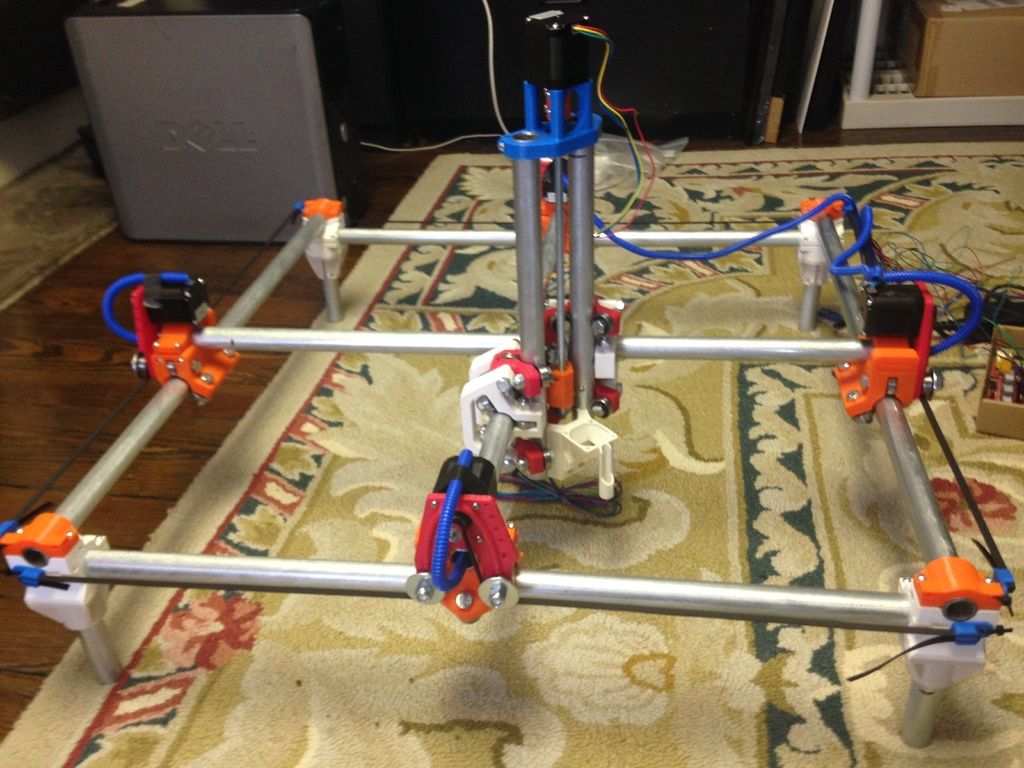
Y Axis
First you need to glue two wooden boards together.
Then place the printed parts "Motor", "Z-Motor" on the wooden boards.
Then fix the printed parts with the screws.
Next step: fit the motors into the slots and then the LM8UU bearings.
Install the pulley on the motor and the 624zz bearings next to it.
Use plastic ties to secure LM8UU bearings.
Next - install two guide rails 17.5 cm long with a diameter of 8 mm.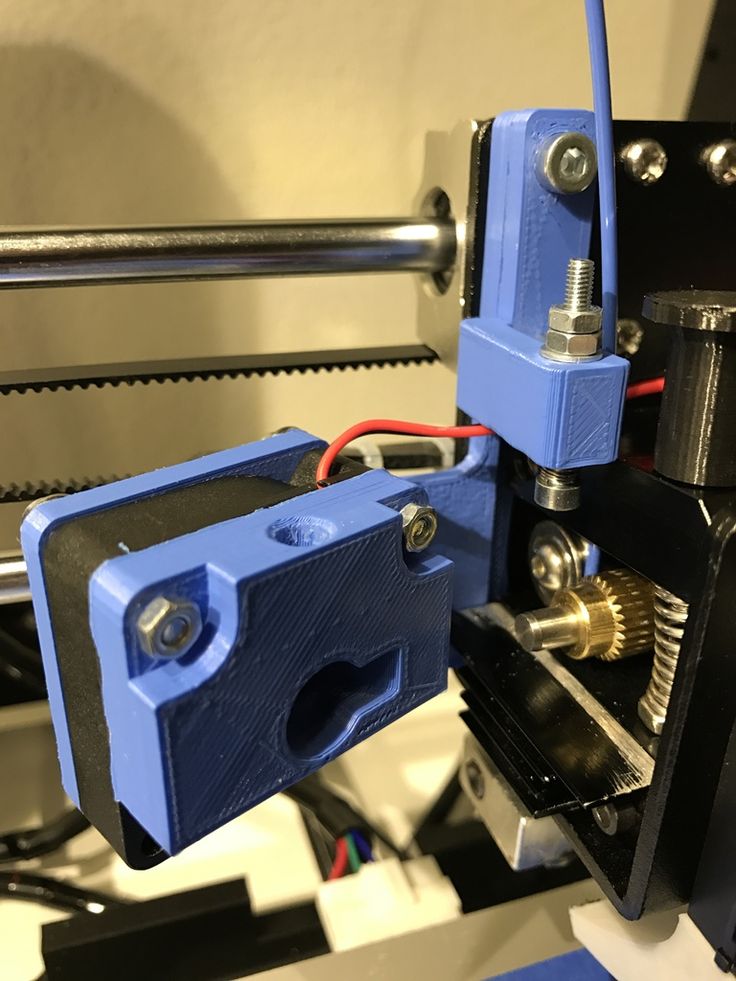
Finally, pull the belt through the "Y-ends" and install the limit switch.
X-Axis
For X-Axis you need:
Install two M4x45mm bolts in the "X-End".
Connect the motor as shown in the illustrations.
Tension the belt and install the limit switch.
Mount the extruder with two screws M3x25 and tighten with nuts.
Z Axis
In order to assemble the Z axis, you need:
Install LM8UU bearings in "X-Carriage" + "X-Ends".
Post install "X-Ends" + "X-carriage" on rails 17.5 cm (X-Axis) and 21cm (Z-Axis).
After that it is necessary to connect the threaded shaft with the motor
Printing table
We drill four holes with a diameter of 3 mm in a wooden plate 20x13 cm.
After that we tighten 4 bolts M3x25.
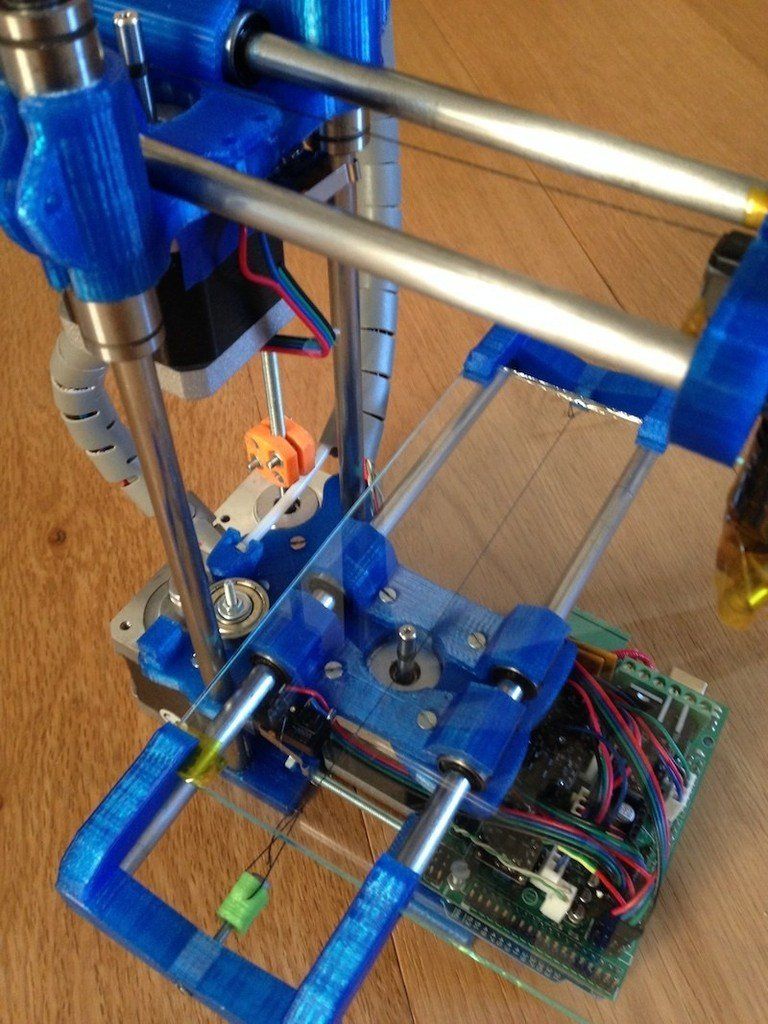
We assemble the entire 3D printer
We assemble it in accordance with the figures below. There is no point in giving additional explanations. The main thing is that the previous steps are correctly implemented.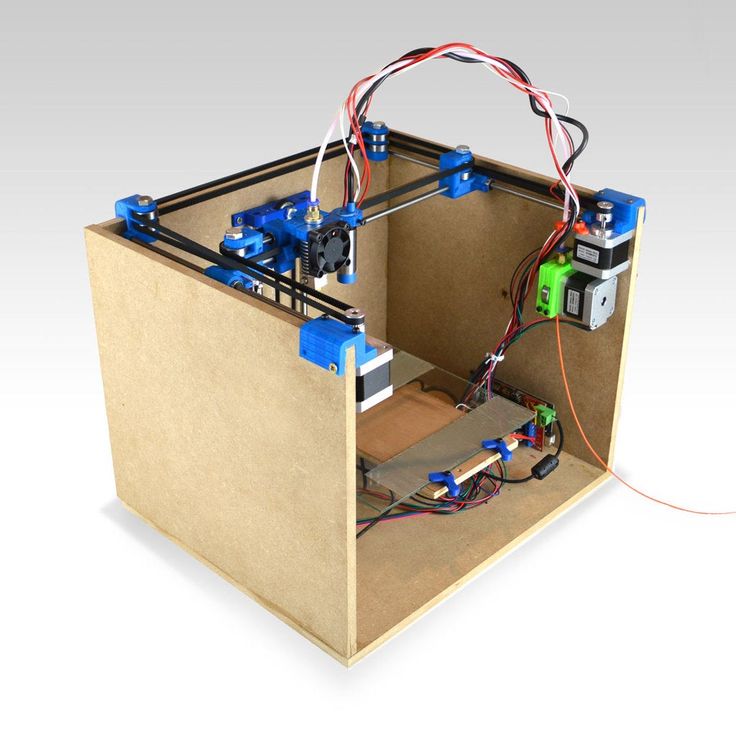 In this case, there should be no problems.
In this case, there should be no problems.
We connect electronics to the 3D printer
We connect electronics (including Arduino) in accordance with the figure below.
Software for Arduino
You can download the Arduino IDE configuration file from www.repetier.com.
This should be enough. You can carry out direct adjustment for your received design, dimensions, etc.
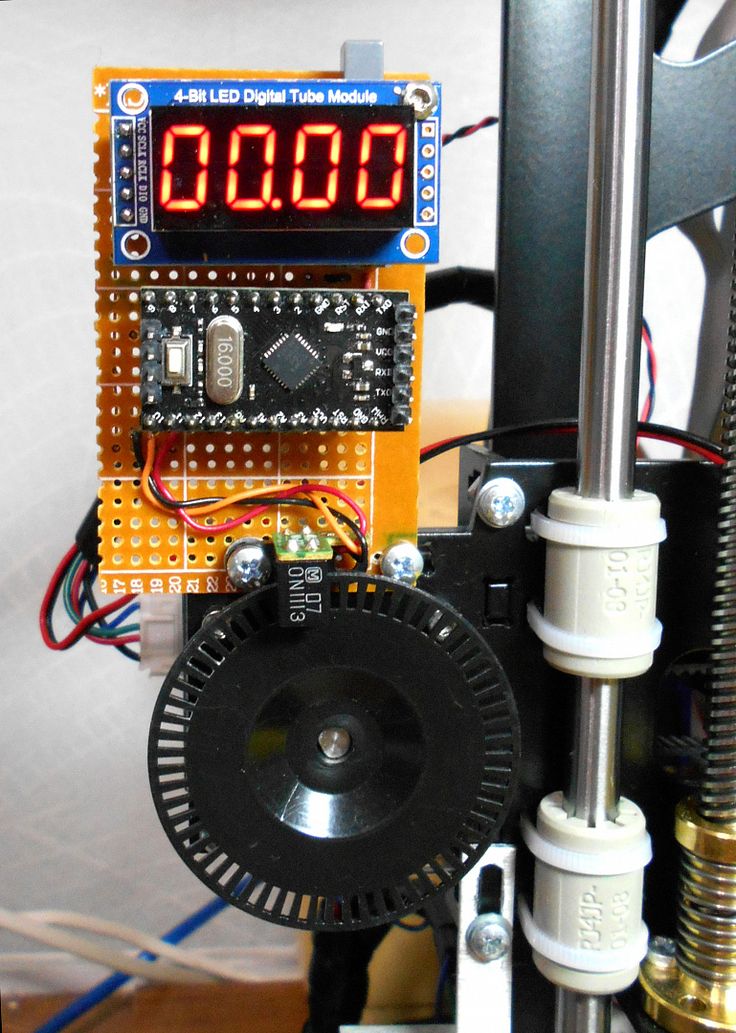
Photo of the printing process and results
After some calibration, good cube samples were printed with dimensions of 1x1x1 cm. As a result, there is a significant displacement of the layers.
So I recommend setting the A4988 to 1/16 microstepping and adjusting the current to the minimum value.
You can also play around with the Arduino firmware to get better results.
Leave your comments, questions and share your personal experience below. In the discussion, new ideas and projects are often born!
Why the first 3D printer is worth assembling yourself / Sudo Null IT News
- 0207
- It's faster than waiting from China Anet A8 for $109
- This is better (with non-crooked hands)
And finally, sooner or later you will face the need to repair / modify the printer and you will still have to master the practical skills of these devices.
And at the most inopportune moment.
And given that there were New Year holidays ahead and a long quarantine winter evenings,
I bought all the necessary components in two days in three local stores, which cost the same $ 109.
And only thanks to the "Martian rule" the total amount increased by only three evergreens.
But contrary to the well-known tape from the film, I used blue (and how could I do without it) electrical tape and plastic ties.
In general, if you are only thinking of assembling a 3D printer - welcome under cat,
where will be my thoughts on the design and assembly of some nodes.
For there are so many detailed assembly instructions on the Internet.
So, let's start with the Martian rule - after purchasing all the necessary components, consider that you are on the red planet, and the next rocket from Earth will be in half a year.
Thanks to this, I avoided an increase in the cost of the device by at least one and a half times and still improved the quality of the mechanical part.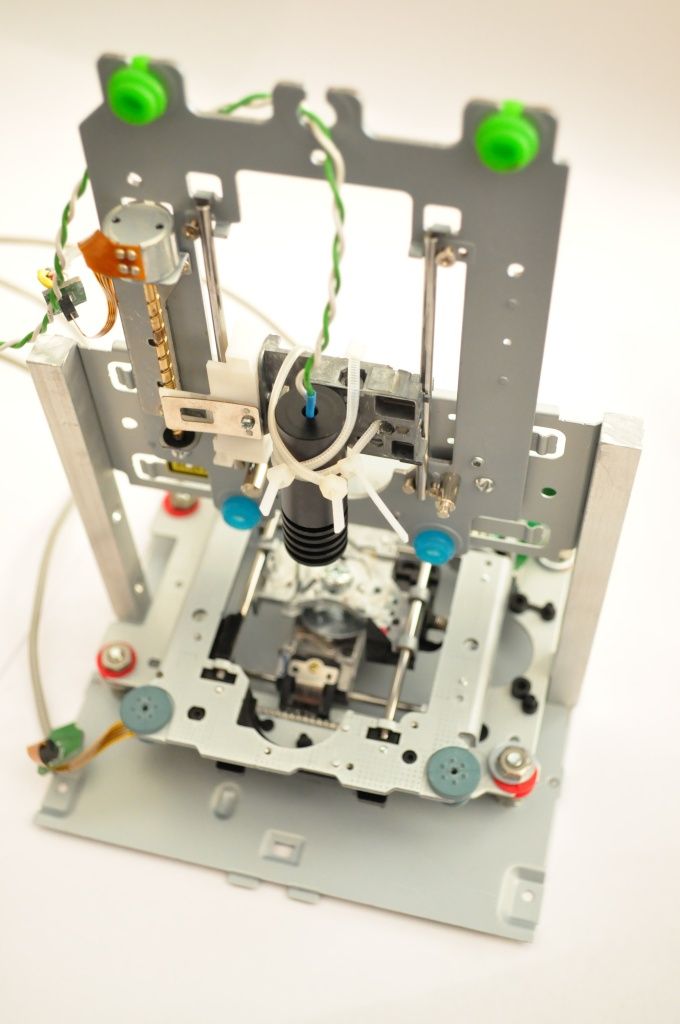
The only thing you can afford is to go to neighboring manufactured goods or unscrew a spare part from your favorite rover is large.
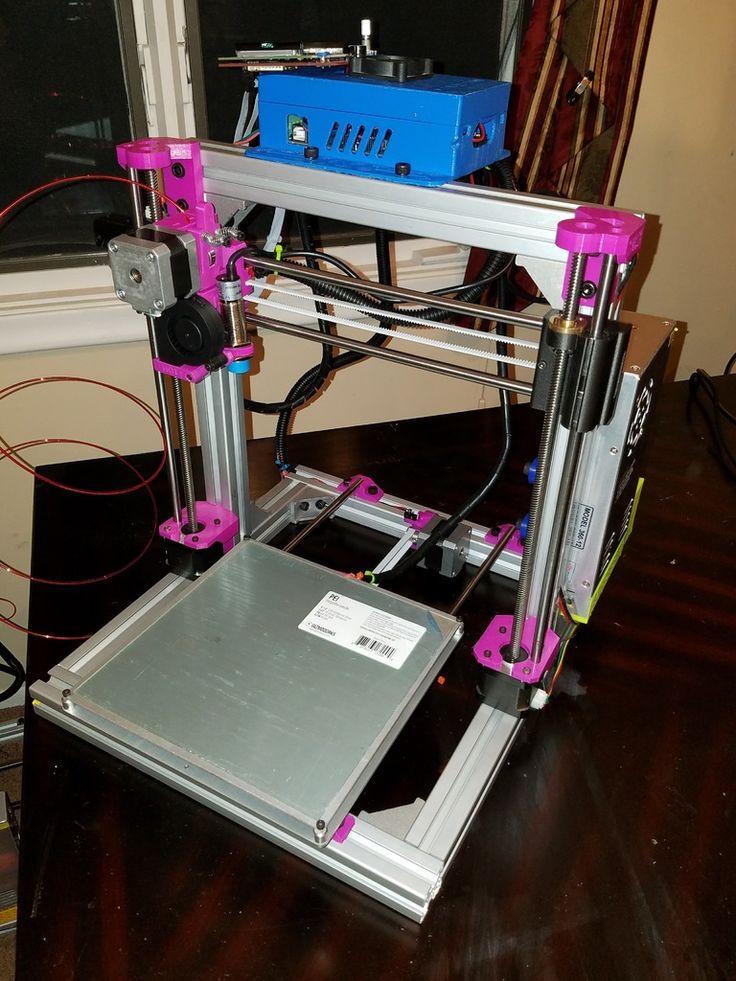
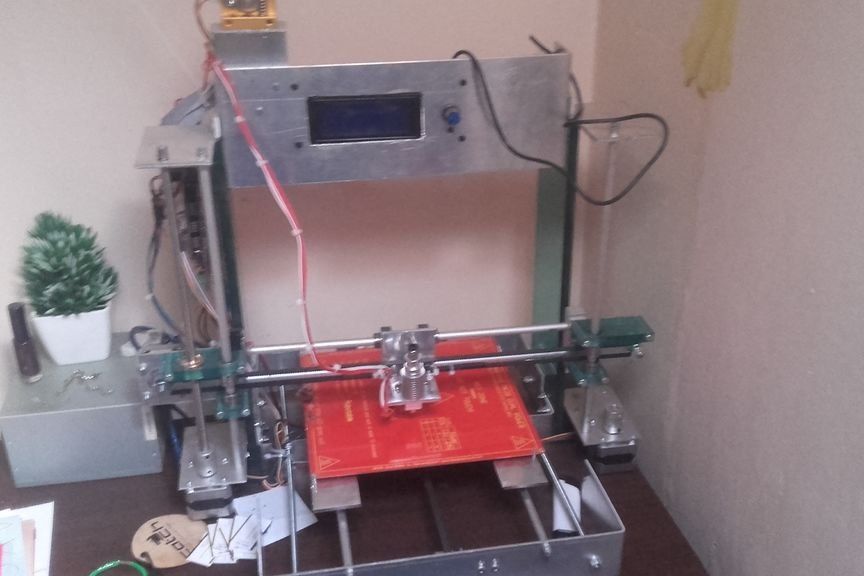
Next, we will talk about assembling a Prusa-compatible Graber I3 printer, but it also applies to any device based on the RAMPS 1.4 + Arduino Mega 2560 control board. his hand and began to shake.
Correct! Without proper mechanical strength, you will either have to set the level of the printer table every time, or screw it with screws to the kitchen worktop.
From this point of view, the presence of a high box at the base adds rigidity compared to the original grabber or Annushka.
But the second time from the start I would have already assembled RepRap Mendel
Yes, the body is made of plywood, as I will have to paint, peel and drill during assembly, the main thing is not to loosen the seats giving room for backlash.
It is better to paint with acrylic varnishes - they do not stink, unless their version is sprayed.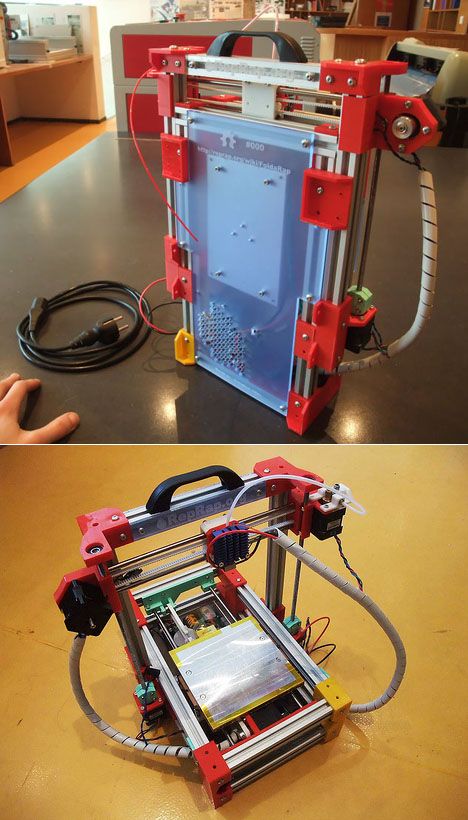
And of course, plywood is preferable to metal in terms of acoustic comfort.
The only disadvantage of the selected ATX version of the case is the inconvenient vertical position of the screen compared to the original Graber version:
Pluses - better durability, you don't have to bother with laying wires and fixing the control board, the use of cheap ATX power supplies.
So we come to the second cornerstone issue - NUTRITION.
Our 12 volt unit should provide 20A.
Remember how you chose a PSU for your gaming/school/work PC?
By weight!
I will say right away that if you buy a new power supply from a store, it is no lighter than 1 kilo and the declared power is from 400W.
If used - look at the current and before use you should remove the cover and blow out all the dust with a compressor - at a tire fitting you will blow it out for three rubles along with cockroaches.
Go ahead, computer scientists / 3D-shniks are cool guys, but sometimes they forget Ohm's law by connecting power to the RAMPS with one, Carl wire AWG-20 (section ~ 0.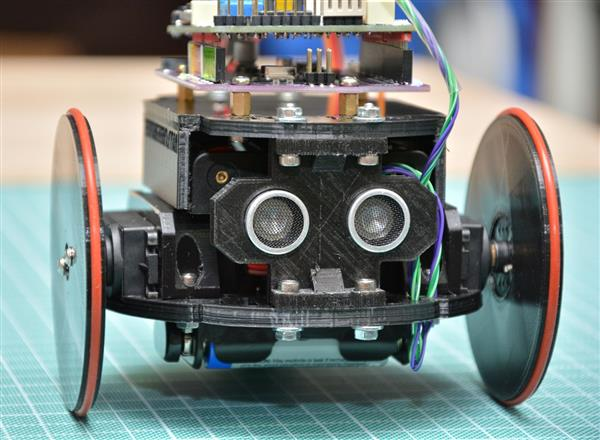 5mm sq.)
5mm sq.)
I did the right thing and made a mistake!!!
On a hot table with a power of 120W, a current of 10A simply melted the power connector
I had to dismantle it and solder the wires.
Yes, about soldering irons - the power of 60W is decidedly small: neither the old-fashioned one with a copper (thick) tip, nor the modern one with a thermostat could melt the solder in the process of soldering an acoustic wire with a cross section of 1.5 squares to a hot table.
I had to unearth an ax from the pantry:
But it will not be a crime to use a wire of 1 square and solder not 3, but 2 twisted AWG-20 wires from the power supply, then 60W is enough.
Continuing the topic of Ohm's law - You have already purchased "cheap" NEMA-17 stepper motors, it's time to look at the current consumption of the windings.
Standard model 1.66 (1.7) A, reinforced - 2 (2.1) A, "quiet / cheap" - 1.33 A, I have the last one.
The current produced by a conventional driver 4988 is up to 2Amps (even the dock does not speak to the winding or in general.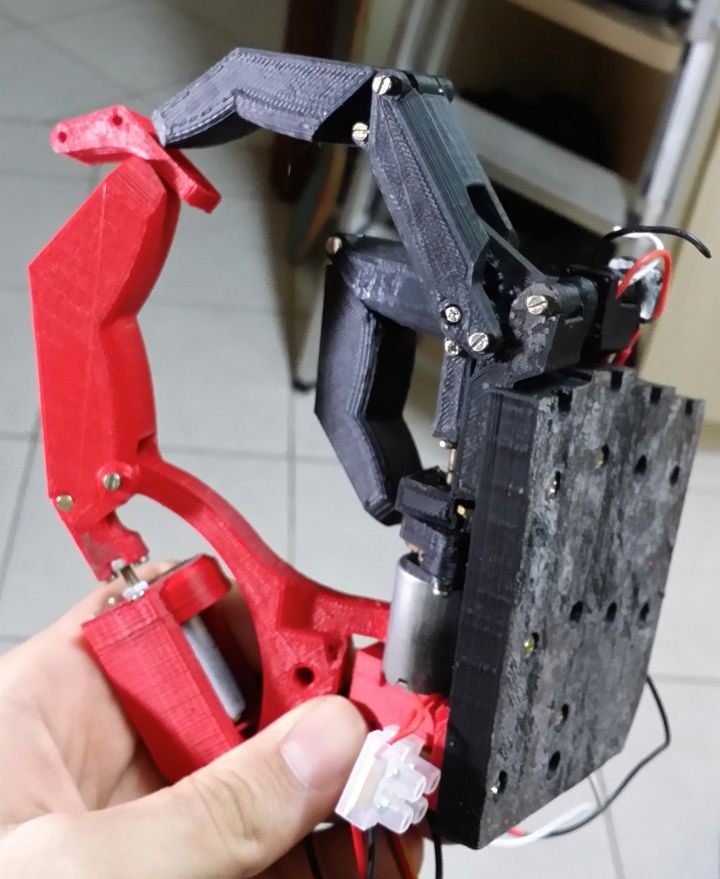
Everything seems OK, but there are two motors and RAMPS on the Z axis, and other control boards obviously contain two connectors for their parallel connection.
No, it's not scary if the R100 resistors are charred at the maximum current (there are boards with R50 for half the current).
And not even that the engines do not receive enough power (I have 0.75A everywhere except for the Z axis)
It's just that with this inclusion, the characteristics of the engines must match ABSOLUTELY, otherwise a wedge / skipping steps is possible in certain modes.
The REPETIER firmware did not cope with this at all, MARLIN got lost once at the stage of moving the extruder from the parking position at the beginning of printing.
Neither shuffling the motors nor the drivers helped.
The Z axis with two motors is saved only by their serial connection:
And oh, miracle, everything worked not on 2 amperes, but on the same 0.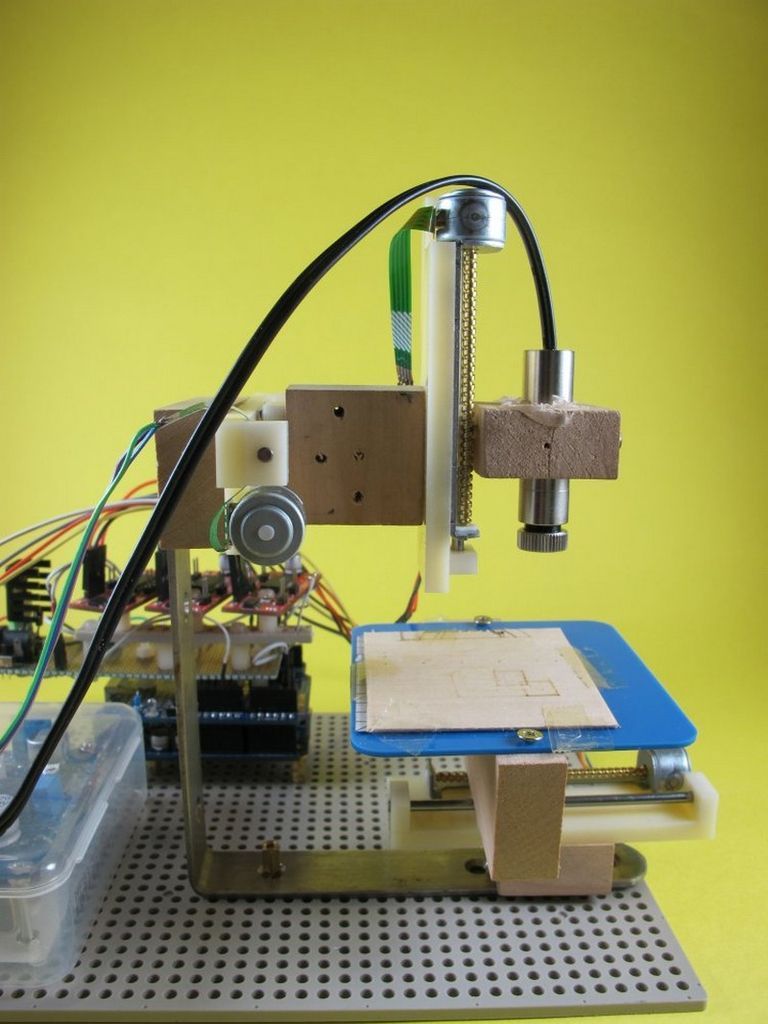 75 as the rest of the axes!
75 as the rest of the axes!
Someone may reproach me for the insufficient accuracy of the assembly of the axles, and as a result, the large required force on the Z-shafts.
I will answer - with the printer turned off, turn the right / left shaft by hand - what will happen to the free one?
That's right, for most it will remain motionless, but for me, when connected in parallel due to self-induction, the second shaft also spun.
Yes, about the shafts - usually, the Graber is designed for Hozmag threaded studs m5 with a pitch of 0.8mm.
They should be lubricated with any paste-like grease for bearings - CV joint, "blue" for needle bearings, graphite and hot grease!
In general, you are on your way to your grandfather's garage / car market, or even better, take lubricant from moon rover bike chain.
Of course, you can also buy the glamorous white Molycote-DX, but this is a matter of taste.
Yes, here the "Martian rule" saved me for the first time - I screwed up the sockets of the nuts of the left carriage of the Z axis Almost ran to buy 3D plastic X/Z carriages and "regular" trapezoidal studs/nuts But no, it turned out that you can throw away the extra / incorrect pads, and nuts on m6 are perfectly clamped between the elements of the plywood carriage: By the way, there were no stainless steel studs in the local hardware store - I took ordinary, galvanized ones. Filed off the threads a bit so they fit into 5mm sockets and bingo! The advantages of such tuning are a normally considered thread pitch of 1mm and the fact that not a threaded part, but a cylindrical part is clamped into the stepper sleeve! Yes, I recommend reaming the mounting holes of the Z-axis motors with a 5-bit drill before assembling - the distance between the guide and the threaded stud varies slightly in mounting and carriages! As a result, this leads to the fact that when moving along the Z axis, the upper ends of the pins move in a circular orbit, and the extruder shakes. In general, you need to select the position of the motors so that the pins remain on the same axis when the axes rotate (via the printer menu). In addition, many mounting holes were reamed, because the sockets in the plywood of my version of the printer are cut out for the M5 nut. Don't forget to press down on the plank when drilling from the back side, otherwise chipping of the plywood can be catastrophic. In a word, the base of the body is assembled on five-millimeter bolts!!! Yeah, and the notorious left carriage is generally assembled on screeds: The fact is that with 6mm studs and 4 fastening screws, a touch was found on their threaded parts. I didn't use 3mm screws and hope for half a millimeter, but used zip ties. This is a truly unique fastener that has replaced the wire used in the past. The only thing that screeds cannot withstand is water hammer in the country water supply. So if you're going to Mars, grab more zip ties! Now let's move on to the control board itself, or rather to the stepper motor drivers and their settings. Let's talk more specifically about the fight against noise. Someone puts expensive TMC2100 drivers in "silent" mode (by the way, you need only two of them - on the X and Y axes) But it's really all about psychoacoustics: And now let's calculate - with a microstep of 1/16, a carriage speed of 60 mm / s and a 20-tooth gear with a 2 mm belt pitch, we get a frequency of 4800 Hz !!! OMG! This is the same peak frequency of perception! Is it possible to double the microstepping (and at the same time the current in order to avoid skipping steps) by installing a DRV8825? thereby shifting the frequency range upwards. And you can show the noise of the middle finger Of course, you can completely remove the microsteps, and stop at the positioning accuracy of the X, Y axes of 0.2 mm. For most tasks, this is enough, the printer will start to "bass" at 300Hz. But it's all about individual preference and sound perception - experiment with a smaller microstep divider and find your comfortable frequency! Where the DRV8825 really comes in handy at 1/32 micro pitch is the standard MK8 extruder! If we calculate that with a 1.75mm filament and an 11mm toothed roller, on a standard 0.4mm nozzle and a 16 divider, we get a 0.2mm column of plastic per step!!! This replacement is justified only after adjusting the pressing force, extruder temperature, plastic type and stepper motor current! If you cannot ensure that the feed system operates normally without clicking and with less than half the nominal current on the stepper, this path is not suitable. Then you should either print a gear feed system or buy a "Titan", which will contradict the "Martian Rule". Has the quality improved from such tuning? At least the supports began to separate without excessive effort, which is already an indicator. To print gears and other parts of the RepRap system (partially self-reproducing printer), a certain print quality is required. But having reached it, the need for the above paragraph disappears. OK, the second most important part after assembly/adjustment of the X/Z axis is the print table!!! Here I am not against plywood, but not for it either! Maybe the proximity of the heating element, even if it was covered with thermal insulation, was influenced by the fact that I did not paint the plywood base with silver, or maybe three bearings instead of four. In general, the level of the table walked constantly, unpredictably and by 0. And if it weren't for the "Martian Rule", an auto level would have been bought. In a word, armed with a grinder, I built a table for 4 bearings from an aluminum-polyethylene-aluminum sandwich: Now the table walks no more than 0.05 mm (I checked it with probes to adjust the valves) and I don’t even correct it for the layer 0.20/0.30 mm. Yes, the springs are mega-rigid, I took brass adjusting screws from the same table as the upper support / spring guides. And the glass of the table, it is 4 mm, because this is its main rigid element (the 1.5 mm textolite of the heater "walks" and bends as it wants). Clamps should preferably be placed as close as possible to the corners, but this interferes with the control/adjustment of the gap! And yes, my axles turned out to be longer, I didn’t cut them, but fixed them with ties - it’s more reliable! Print area is 190x180x180 (XYZ). Of course, you can radically redo everything (make the table lower, change the fastening of the belt on it, otherwise position the extruder), but for now it suits me. And a few words about firmware - I counted 8 different names, but I tried only three: At first I grabbed the second version of Marlin, hoping to switch from Arduino Mega to Due, which has been gathering dust in the box for a long time, but the firmware is heavy both during compilation and for the 8-bit Atmega2560. Then stuck with engines in Repetir. Teacup considered between glasses of tea - not ours how to quickly launch the 2004 screen - gave up this idea. Well, I returned to Marlin version 1.1.9, downloading separately examples of firmware from github. I came up with a fresh version from Aliexpress's Prusa_i3_MKS_Gen_2Z_V1.2, set only my table sizes, steps and inverted the Y direction. That's basically all my notes/remarks. Yes, the choice of filament should also be taken responsibly. Don't print out of shit Liberator! Of course, you've probably already bought a roll of ABS along with the rest of the accessories, but it's better to save it for later, and take PETj, coPET or PLA first. I bought coPET right away. The fact is that these plastics are not as demanding in terms of parameters and printing conditions as ABS. Someone even prints with them on printers without heated bed! ABS is good only for the price, but if you print in a living room not under an exhaust hood, the aroma will still be the same. Yes, and they talk about the dangers to health from its fumes, and heating the table to the desired 100-110 degrees Celsius requires titanic patience. By the way, I got the "Zaporozhets" right, up to a hundred So, having printed a skein of filament, I almost ordered a second one, but I found ABS + half the price! On it, the part behaves differently (compared to conventional ABS), the temperature of the table is 90-100 degrees Celsius, and even the first model was still printed, albeit with a tear off of the edges. After that, a hood with a carbon filter was built, a new coil holder and blowing the RAMPS power transistors. And even the edges of the parts began to stick better. It would seem that ABS + is an absolute plus, but no! On the third model, the edges of the part rose along with the 4mm glass, which predictably burst in the middle!!! Maybe the fault was a glass defect, but somehow I didn’t want to check it. Therefore, my choice is PET-plastics (PETj, coPET and others like them) - the table can not be heated at all (when using a regular PVP-based glue stick). I heat it for the first layer to 75 degrees Celsius, then - 70 in order to avoid peeling high parts.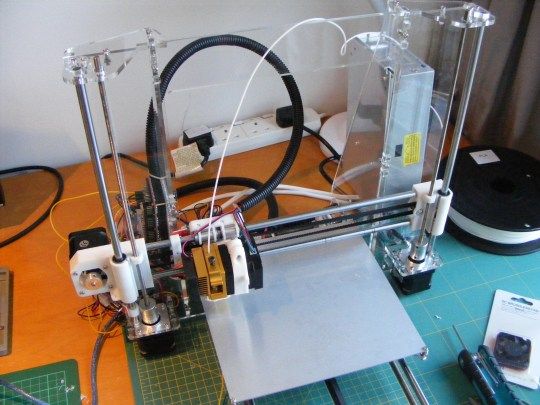
jumper by moving to a 1/4 microstep. 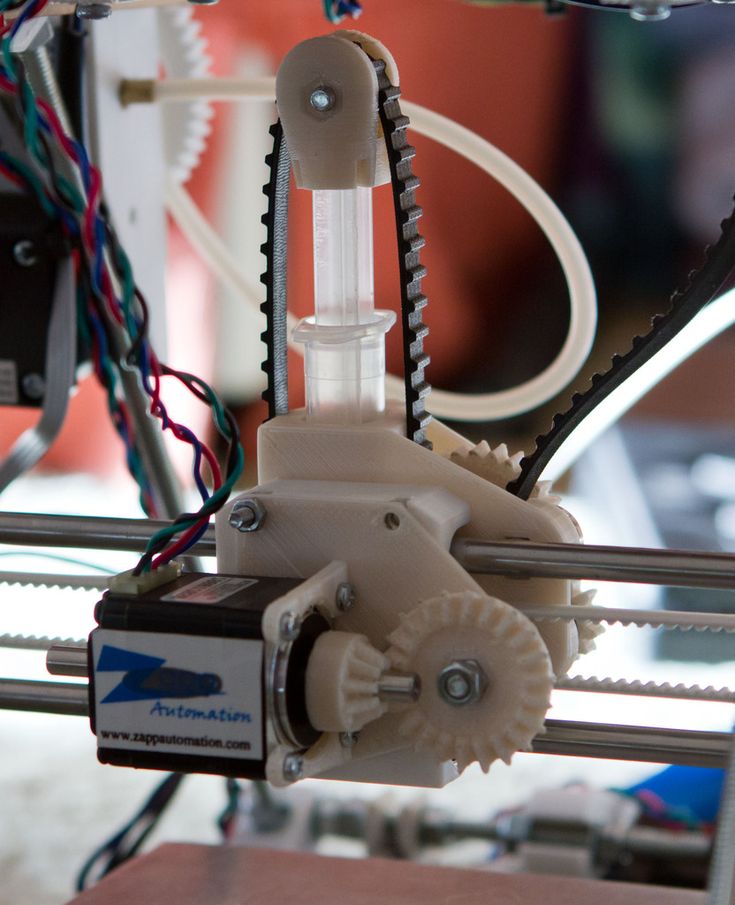
 2 mm!
2 mm! 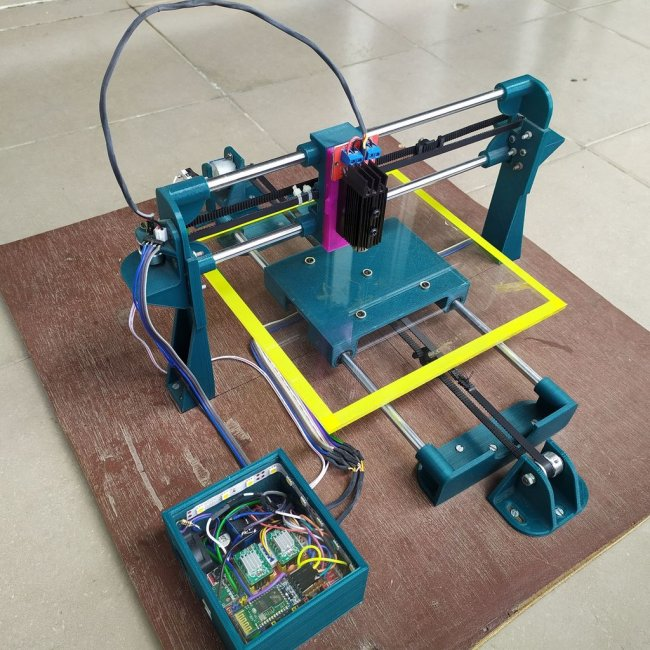

accelerates heats for 10 minutes, up to 120 - nothing.
Learn more