Real time 3d scanner
Blog | ReconstructMe | Real Time 3D Scanning Software
Today, it’s our pleasure to announce completely new scanning strategy that improves hand-held scanning in many ways. Although we are in a prototypical stage, we wanted to share the lasted achievements with our readers.
Limitations of hand-held scanning
One of the major issues with hand-held scanning is the fact that the set of tolerated scan motions does not match your natural sequence of movements. This means that you are often constrained to move slower than intended, plus you have make sure that the scanner points at areas of interest and keeps a certain distance to the object being scanned. Violation of any of these contraints leads to ‘tracking lost’ and corrupted data scenarios. We’ve seen unexperienced users being frustrated by these implicit scanning assumptions more than once. Moreover, this frustration quickly turned into to refusal of the 3D scanning technology all together.
Improving usability
So, we thought about ways to improve the usability of the system and came up with the following. In the video linked below you can see a new low-cost 3D scanning device that does not lose track no matter how jerky the movements are.
Features at a glance
Robustness
The new system is robust to any kind of jerky movements. Move naturally and never lose track again. In case you put the scanner aside for a pause, you can immediately pick up scanning from any location within the scanning area.
High accuracy
The system offers a constant error behaviour across the scanning area. Accumulation of errors due to drift is suppressed. The tracking accuracy is mostly independent of surface material and geometric structure of the scene.
Low-cost components
We’ve put strong efforts into cutting costs by using commodity hardware components.
Scale
The supported scanning area is flexible – from desktop up to areas that easily fit an entire car.
We plan to release more material soon. We hope we’ve raised your interest. Stay tuned!
We hope we’ve raised your interest. Stay tuned!
We’ve just released a new version of ReconstructMe SDK that supports all currently available Intel RealSense (F200, R200, SR300) models. reme_sensor_create now accepts a librealsense driver argument that will try to open the default Intel RealSense camera. More options can be set by via sensor configuration files. Multiple camera support is also available. See reme_sensor_bind_camera_options for a list of available options.
Download ReconstructMe SDK 2.6.43 x64 for Windows 7/8/10.
This entry was posted in 3D Scanning on by Christoph Heindl.Good morning everyone! We had a great Long Night of Research in April this year with more than 300 people visiting us at PROFACTOR. We scanned more than 80 people using a turntable and a single Intel SR300 camera using ReconstructMe. Here’s a good example of what those scans look like.
We scanned more than 80 people using a turntable and a single Intel SR300 camera using ReconstructMe. Here’s a good example of what those scans look like.
All models have been generated automatically without any manual interaction whatsoever! Please note that models are uncompressed and take a while to load up in your browser. Head over to entire scan collection.
License
Unless otherwise stated, all 3D model files are licensed under CC BY-NC 4.0. This means you can share or adapt them as long as you give appropriate credit and don’t use the material for commercial purposes.
This entry was posted in 3D Scanning on by Christoph Heindl.Our team has been working hard in the past couple of months to improve overall reconstruction quality of ReconstructMe. We’ve put a lot of our attention towards generating photo realistic 3D scans using low-cost consumer sensors.
What we’ve come up with is a unique texturing pipeline that runs fully automatically and is able to compensate most of the artifacts caused by illumination, motion and other sources of errors. The interactive 3D viewer below shows a 3D bust generated using this work-in-progress technology.
The setup consists of a single INTEL sensor and a standard desktop PC running ReconstructMe. The bust was generated automatically. No manual interaction whatsoever.
Please be patient while loading as the geometry and textures are uncompressed.
We’d be happy to receive your feedback.
This entry was posted in 3D Scanning on by Christoph Heindl.We are proud to announce ReconstructMe v2.5.1034. This updated simplifies and improves the configuration of your sensor. Either select a supplied configuration, tailor-made for every supported sensor, or write and tweak your own configuration as before.
Additionally we made improvements to the user interface as we refactored parts of the ui code – most important ReconstructMe is now dpi aware and can be used out of the box on high resolution displays.
We also improved the rendering code, resulting in less overhead and more efficient usage of the GPU.
This entry was posted in 3D Scanning on by Thomas Pönitz.As you know ReconstructMe already supports a variety of commodity 3D cameras and we are working hard on integrating new and exotic ones as soon as we take notice of them. We felt it is about time to put details into perspective. Therefore we are kicking off a camera review series to cover sensor specifications, installation instructions and more.
Starting with the Intel RealSense R200 review, we plan to have an in-depth review of each sensor supported in ReconstructMe. The list of supported sensors and reviews can be found on our supported sensors page.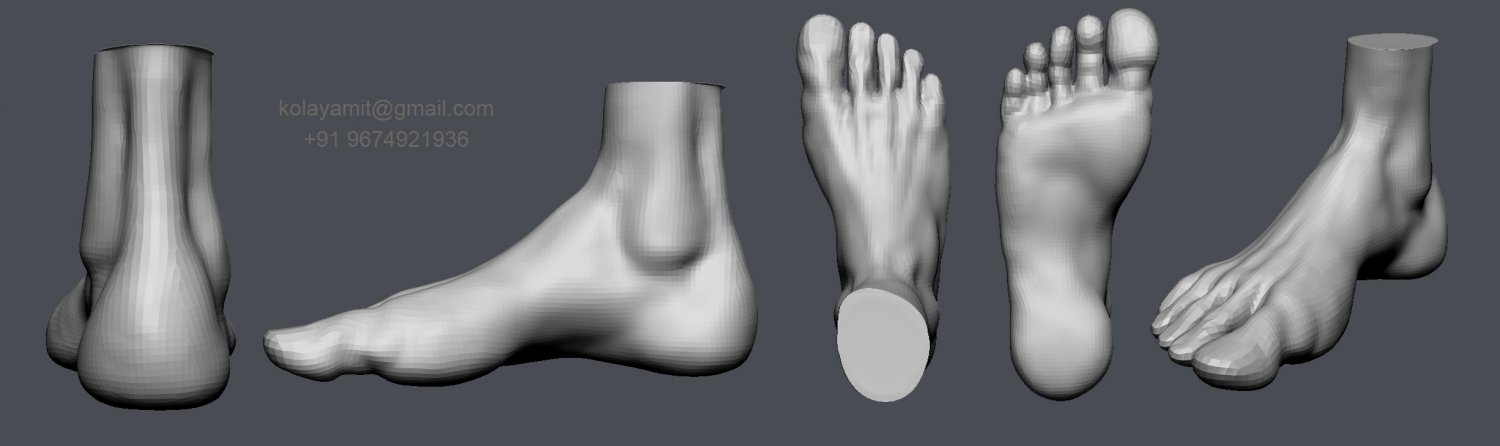
On behalf of the ReconstructMe team, I’m proud to announce ReconstructMe v2.4.1016. This update improves support for the following sensors
- Intel RealSense F200
- Intel RealSense R200
You can grab the latest version from our download page. We are releasing this version free of charge for non-commercial projects as announced recently.
Usage
To use Intel RealSense cameras on your computer you will need to install Intel RealSense camera drivers and use the correct ReconstructMe sensor configuration files. For your convenience, you can download both from below.
- Intel RealSense F200 Camera Driver v1.4.27, Intel RealSense Runtime and F200 Sensor Configuration File
- Intel RealSense R200 Camera Driver v2.0.3, Intel RealSense Runtime and R200 Sensor Configuration File
Once you have installed the necessary components, open ReconstructMe and set the path to the configuration file as shown in the screenshot below.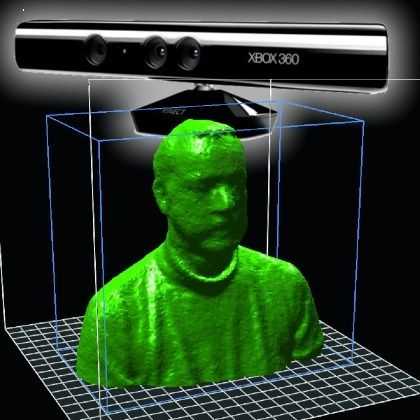
Troubleshooting
Please note that Intel recommends connecting the sensors to a dedicated USB3 port directly. Avoid using hubs or extension cables. When your sensor does not respond for longer period of time, restarting the Intel depth camera services might help. You can easily find these services in local services management console as shown below
This entry was posted in 3D Scanning on by Christoph Heindl.From now on, ReconstructMe – our user interface for digitzing the world in 3d – is available to everyone for free!
We offer ReconstructMe free of cost and without limitations for private and non-commercial projects. This means you can download ReconstructMe and use it for everything from scanning for 3d printing, architecture, documentation and animation. For commercial purposes we continue offer royality fee based licenses of ReconstructMe and ReconstructMe SDK.
Head over to the download area and grab the latest version in order to set it free. If you already have ReconstructMe licensed, but your license expired, then re-open ReconstructMe and it will run in non-commercial mode instead of unlicensed mode.
This entry was posted in 3D Scanning on by Christoph Heindl.Use the opportunity to discuss with numerous international experts from 10 countries and 3 continents, both from science and industry, what 3D printing technologies offer today and what they can be expected to offer in the future.
What is special about Add+it 2015?
Workshops provide the opportunity to interact with participants and experts; discuss relevant 3D printing issues and initiate possible further business cooperations.
The Add+it 2015 is organized by PROFACTOR and IPPE, the Institute of Polymer Product Engineering at the Johannes Kepler University Linz.
Registration and Fees
- Further information on venue, programme and registration is available on the conference website.
- The registration form should preferably be completed online. Deadline for registration: August 20, 2015
Early registration with a discount of € 30,- is extented until August 10, 2015!
This entry was posted in 3D Scanning on by admin.As promoted in our previous post we added a new color tracking feature to the SDK and promised to release a new UI frontend version supporting it. Today it is my pleasure on behalf of the ReconstructMe team to announce this new fronted release.
In the video below you can see ReconstructMe UI in action. Both scenes are tracked mainly due to color information, as the geometric information alone (planar shape in first scene and cylindrical shape in second scene) do not suffice to estimate the camera position accurately.
Color tracking is currently enabled for all sensors that support a RGB color stream. Algorithm settings are chosen automatically, so you don’t have to configure anything. In case your sensor does not support RGB the algorithm gently falls back to geometric tracking only. Note that scanning colorized is not a requirement for the color tracking algorithm to work properly.
Here are some tips for best results
- Ensure that the scene you observe is texturally and/or geometrically rich. Although we’ve tuned the algorithm to cope with lack of information in both streams, we need at least some information to be present in the scene.
- Try to get around 25-30 frames per second. Color tracking requires small increments in the transformation of the camera, otherwise it will not converge. Please note that the color tracking does more than geometric tracking alone, so it has a small increased runtime footprint.
- Try to avoid fast camera motions that potentially blur color images.

- Try to avoid reflective materials. Although a reflection appears as texture, it visually changes when moving the camera.
After weeks of hard work we are proud to announce a new upcoming feature called color tracking. Color tracking incorporates color information into camera motion estimation. This allows ReconstructMe to keep track over planar regions, cylindrical shapes or other primitive shapes. The following video shows some challenging reconstructions that succeed with the help of color tracking.
The new tracking algorithm seamlessly blends geometric and color information together, leading to an overall improved tracking performance in almost all situations. During development we’ve paid attention to robustness and runtime. As far as robustness is concerned, we’ve made sure that fast variations in illumination or camera auto exposure do not affect the tracking performance.
From a developer and user point of view you should be aware of the following points to maximize tracking stability.
- Ensure that the scene you observe is texturally and/or geometrically rich. Although we’ve tuned the algorithm to cope with lack of information in both streams, we need at least some information to be present in the scene.
- Try to get around 25-30 frames per second. Color tracking requires small increments in the transformation of the camera, otherwise it will not converge. Please note that the color tracking does more than geometric tracking alone, so it has a small increased runtime footprint.
- Try to avoid fast camera motions that potentially blur color images.
- Discard the first few camera frames as we have observed cameras to vary exposure vastly in these frames.
- Make sure that the color camera is aligned to depth camera in space and time.
In case tracking fails we’ve also added a recovery strategy that takes color information into account. This global color tracking allows you to recover by bringing the sensor in a position that is close to the recovery position shown as shown in the following video.
This global color tracking allows you to recover by bringing the sensor in a position that is close to the recovery position shown as shown in the following video.
Our roadmap forsees that we first release a new end user UI version that supports color tracking in the coming days. This will allow us to have many people test the current state of the algorithm and hence provide us with valuable feedback.
This entry was posted in 3D Scanning on by Christoph Heindl.We’ve completed our work on the PayPal backend and opened the shop again. Please feel free to place your orders.
Best,
Christoph
Please note, that our our web-shop is closed for maintenance reasons regarding PayPal rearrangements. We plan to be back online in a couple of days.
We plan to be back online in a couple of days.
In case you need volume licenses instantly, please drop us a mail at [email protected].
Thanks,
Christoph
We continue to update ReconstructMe and are happy to announce our newest release supporting Intel HD 4000/4600 and Intel CPU Core i5/i7.
In case you intend to run ReconstructMe on a Intel HD graphics card, please update the graphics driver. If you favor running ReconstructMe on your Intel CPU install the latest OpenCL runtime.
Have fun reconstructing and let us know what you think!
This entry was posted in 3D Scanning on by Christoph Heindl.We have just released new version of ReconstructMe. This is a bug-fix release that resolves immediate tracking lost issues on NVIDIA cards: our users reported immediate tracking-lost issues when starting a scan. The issue seems to occur on NVIDIA cards, with preference on the following models: GTX750, GTX970, GTX960, GTX840M, GTX850M. In case you are affected, please try to run the latest version.
The issue seems to occur on NVIDIA cards, with preference on the following models: GTX750, GTX970, GTX960, GTX840M, GTX850M. In case you are affected, please try to run the latest version.
Top 3D scanner apps and software in 2022
3D Learning Hub
See all categories
Contents:
- Introduction
- How does 3D scanning work?
- Photogrammetry software
- 3D scanning software for 3D scanners
- 3D scanning apps
- Let's 3D scan today!
Introduction
How does 3D scanning work?
We already wrote an article about how 3D scanning works, so dig into it if you would like to know all the details! In a nutshell, 3D scanning allows you to produce a 3D model of a physical object. 3D scanning is a technology that’s now available for everyone. Doctors and other professionals use 3D scanners at work, but they are also widely used by commercial companies and amateurs.
3D scanning is a technology that’s now available for everyone. Doctors and other professionals use 3D scanners at work, but they are also widely used by commercial companies and amateurs.
3D scanning can be as easy as using your own smartphone or setting up a bunch of cameras. There are 3 methods to use 3D scanning technology: laser 3D scanning, photogrammetry, and structured light scanning. We prepared a guide to help you choose the best 3D scanner for your project. Since there are different devices used for 3D scanning, we organized our list of the top 20 3D scanning software by type: photogrammetry software, 3D scanning software used for 3D scanners and 3D scanning apps for your phone.
Photogrammetry software
Photogrammetry software is a technology based on photos to produce your 3D models. It uses photographs to calculate measurements and turn them into 3D data. To 3D scan with a phone, drone or a camera, you need photogrammetry software. We already dedicated a blog post to the best photogrammetry software, but now we will enrich this list.
We already dedicated a blog post to the best photogrammetry software, but now we will enrich this list.
3DF Zephyr
3DF Zephyr is one of the leaders on the market thanks to its UI. It is very intuitive and user-friendly. Inexperienced users will be guided through the 3D scanning process, however, 3DF Zephyr is not only for amateurs. Professionals from different fields will use a lot of helpful tools, such as the ability to transform the model into CAD software. There are also plenty of options to tweak the 3D model and adjust it.
Agisoft Metashape
This professional 3D scanning software is popular for GIS applications (Geographic Information System), but also for visual effects production, historical documentation and game development. The software is capable of working with both close-range and aerial photogrammetry.
An interesting feature of Agisoft Metashape is that the user can make 4D models as the software allows to save whole scenes as editable 3D objects
Autodesk ReCap
Autodesk ReCap stands for Reality Capture. It uses photos, but can also apply laser scans to produce 3D models. It can be used for aerial scans and close-range. The 3D objects can be used with CAD and BIM software. With this 3D scanning software, you will be able to achieve high-quality models, which can be edited thanks to specialized tools.
It uses photos, but can also apply laser scans to produce 3D models. It can be used for aerial scans and close-range. The 3D objects can be used with CAD and BIM software. With this 3D scanning software, you will be able to achieve high-quality models, which can be edited thanks to specialized tools.
Bentley ContextCapture
This is a very powerful professional photogrammetry software, capable of producing whole infrastructure landscapes. It will give you a lot of advanced tools to organize and edit the 3D models. This software is popular for construction projects, it can create highly detailed street views This software can be with aerial photogrammetry and laser scanning in order to achieve the best 3D models. With Bentley ContextCapture you can even produce 3D animations and fly-throughs.
Colmap
Colmap allows for the production of 3D mesh from one camera or from a set up of cameras. It is free and easy to use. There are more advanced options available, especially to improve quality. However, you can’t edit the 3D model in this software. It is great for quick and easy 3D scanning.
However, you can’t edit the 3D model in this software. It is great for quick and easy 3D scanning.
DroneDeploy
As the name suggests, this 3D scanning software was designed for drones. It consists of two apps. One controls the path of the drone and will guide it from take-off to landing. A second program gathers the photos and creates a 3D model. It provides you with tools to measure areas, volumes, and distances. Additionally, you can add more personalized features.
IMAGINE Photogrammetry
IMAGINE is a professional photogrammetry software. It is important for you to consider if you’re planning to work with mapping 3D scans. It is very well known in the industry and used by the department of transportation, commercial mapping companies, and national and regional mapping authorities. It provides users with plenty of professional tools such as different point cloud views, to help transform the photos and manage large data.
It provides users with plenty of professional tools such as different point cloud views, to help transform the photos and manage large data.
Meshroom
Meshroom stands out for an easy learning curve. The 3D scanning process is very intuitive, and based on nodes and creates a 3D model for you. You also have the option to edit the nodes later and adjust the 3D scan according to your needs.
MicMac
This professional photogrammetry software was created by the French National Geographic Insitute and the French National School of Geographic Sciences. It provides you with highly professional tools, especially for academic and industrial applications. It can be used for small and large scale scans.
OpenMVG
Yet another 3D scanning software for professionals. It is trusted by computer-vision scientists and the Multiple View Geometry (MVG) industry. OpenMVG operates with Structure from Motion (SfM) photogrammetry technology.
Photomodeler
Photomodeller allows you to create 3D objects thanks to 3 different methods. You can manually fit common characteristics, automatically produce a 3D model from coded targets or match point clouds from overlapping images. It is an easy to use and affordable 3D scanning software.
You can manually fit common characteristics, automatically produce a 3D model from coded targets or match point clouds from overlapping images. It is an easy to use and affordable 3D scanning software.
Pix4D
This 3D scanning software covers all the tools from flying a drone to generating a 3D model. It will assure your drone path is correct and then allows you to create orthomosaics, index maps, elevation models or point clouds to produce an accurate 3D model. You also have access to different analytic tools so the model can be edited.
3D scanning software for 3D scanners
3D scanning apps
This cutting-edge technology of 3D scanning has gone so far that you can even use your phone to both make a 3D scan and then a 3D model. There are dedicated apps that will allow you to turn a real object into a 3D model in just a few clicks. Learn how to 3D scan with a smartphone
Learn how to 3D scan with a smartphone
Qlone
This is all-in-one mobile 3D scanning software. Qlone will allow you to 3D scan and produce a 3D model with just your smartphone. It’s easy and fast to use. The 3D model can be exported into several 3D formats and sent for 3D printing.
Trnio
Trnio can be considered as photogrammetry software but can be used on a smartphone. It turns pictures into 3D objects, but you can also actually 3D scan the object. It offers two quality options: high and low texturing resolution.
Sony 3D Creator
If you need to get high resolution models using a 3D scan app on your smartphone, this Sony 3D Creator app could totally fit your needs. This free app is perfectly adapted to beginners, allowing you to render your 3D model in 4K for a better resolution.
Heges
Heges is a scanning app for iPhone, targeting professional users. This program has many interesting features: it performs 360° rotation, it includes “Infinity scanning” for large spaces. You can also make the most of its dark mode allowing you to scan in dark environment!
This program has many interesting features: it performs 360° rotation, it includes “Infinity scanning” for large spaces. You can also make the most of its dark mode allowing you to scan in dark environment!
Scann3D
Yet another photogrammetry software. It has a very simple UI and is user-friendly. Take 20-40 pictures in order to generate a 3D model. It can work with small objects as well as bigger objects (such as a tree). You can export your model as an STL file, one of the most popular formats for 3D printing.
3D Creator
This mobile app was developed by Sony and will provide you with high-quality 3D scans, it’s especially popular for portraits. The models can be used within different apps such as messages, but also to 3D print models in full color.
Scandy Pro 3D Scanner
This intuitive 3D scanning software makes it so easy to generate high-quality models. It prides itself in light files without losing quality, built-in support for STL, OBJ, GLB, USDZ and PLY formats, and moreover, fully-featured editing tools.
It prides itself in light files without losing quality, built-in support for STL, OBJ, GLB, USDZ and PLY formats, and moreover, fully-featured editing tools.
Let's 3D scan today!
As you can see the list of Top 3D scanning software is long and for sure one of them will fit your needs. From professional landscape mapping to medical 3D scanning, this technology amazes us. But it can also be used at your home, all you need is a phone.
3D printing can be just as easy. All you need to do is to upload your 3D objects to our online Additive Manufacturing service. 3D printing has never been more simple!
Don’t forget to subscribe to our Newsletter and follow us on Facebook for the latest 3D printing news!
Related Topics
- Return to Top
Get the latest 3D printing news delivered right to your inbox
Subscribe to our weekly newsletter to hear about the latest 3D printing technologies, applications, materials, and software.
Useful articles and examples of 3D scanning
The reference point cloud created at the stage of the photo project implementation allows minimizing the volumetric error during 3d scanning. In addition, it becomes possible to accurately and quickly scan areas of an object that are very distant from each other without collecting all the surfaces between them.
Photogrammetry can be used autonomously as a non-contact measuring machine. In this case, it is possible to make the necessary measurements using marker points. nine0003
Let's consider combined scanning with the RangeVision PRO 3D scanner using the example of an internal combustion engine (approximately 1000 x 1000 x 500 mm in size). Before starting work, it is necessary to prepare both the object itself and the space around it: the object must be placed so that all surfaces to be scanned are available for digitization by both the photogrammetry system and the 3D scanner. Surfaces of an object that are difficult to read by a scanner (such as dark, glare, or oily) should be cleaned and treated with a frosting spray.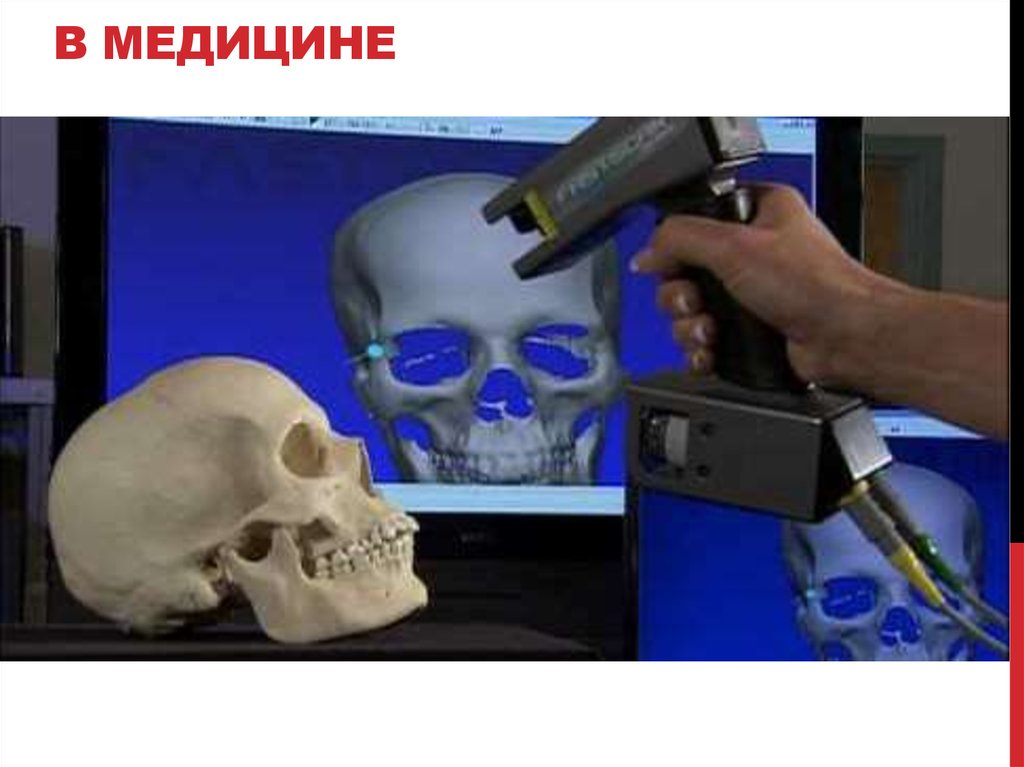 Also, technological markers used for positioning should be applied to the object. nine0003
Also, technological markers used for positioning should be applied to the object. nine0003
The photogrammetric process is reduced to the application of code markers, the installation of scale rulers and the subsequent photographing of the object from various angles.
The final result of the photo project is a reference point cloud, which is exported to the RangeVision ScanCenter program for subsequent scanning. ScanCenter - software for 3D RangeVision scanners for scanning and working with results, it allows you to upload files of reference networks in .basegrid and .obc formats, as well as in specially prepared .txt files. nine0003
The exported reference grid allows you to start scanning from any area. Based on the location of the combination of points that fell into its field of view, the 3d scanner will determine its position relative to the object, and all frames will be positioned automatically in a single coordinate system. Due to this, large frame overlaps are not required during scanning, and the operator performing digitization can observe the result of 3d data collection in real time. nine0003
Due to this, large frame overlaps are not required during scanning, and the operator performing digitization can observe the result of 3d data collection in real time. nine0003
In order to digitize an object completely, it is necessary to scan its surfaces from different angles, gradually moving the 3D scanner. In this case, the operator can ignore unnecessary areas and work only with those that are of interest to the project. Photogrammetry systems can significantly reduce the time spent on scanning an object.
After the automatic processing of the scan data, the operator receives a file with information about the surfaces of the engine in the stl format. nine0003
Thus, RangeVision 3D scanners can be successfully used in conjunction with photogrammetric systems to solve complex, complex tasks and scan large objects.
Video illustrating the process:
comparison and selection based on tasks
3D scanners
Reverse engineering
Geometry control
Author: Ilya Krupennikov
Author: Ilya Krupennikov
What are the advantages of the new SILVER | Go!SCAN SPARK | HandySCAN SILVER | HandySCAN BLACK | Comparison of 3D scanners | What is the best solution for you?
Creaform has updated its HandySCAN 3D line of handheld 3D scanners with the launch of the SILVER series, featuring some of the best features of patented technology at an affordable price. This proven and reliable 3D scanner has been optimized for engineers and other professionals who need an efficient and affordable way to improve their product development process, speed time to market and reduce costs. nine0003
The SILVER line includes two solutions: HandySCAN 307 and HandySCAN 700.
What are the advantages of the new SILVER
series-
Quality optics: Provides reliable and extremely high measurement quality with an accuracy of 0.030mm.
-
7 Laser Arrays: Capture the surface of large objects quickly with a 275 x 250mm scanning area. nine0003
-
Versatility: One device to digitize a variety of parts, no matter their size, complexity, material or color.
-
Ease of Operation: A user-friendly user interface and real-time visualization provide ease of use and a quick learning curve for both experienced and novice users.
nine0069
Portability: Lightweight (850g) and easy to install, the scanner can be set up and ready to go in less than 2 minutes, in any environment, indoor or outdoor.
New 3D scanners are already available for order in our catalog.
Do you want to know the prices of 3D scanners, ask questions or order a free test scan? Fill out online application and our experts will contact you.
We would like to introduce you to the differences between HandySCAN BLACK, SILVER and Go!SCAN SPARK scanners. This review will help you understand which 3D scanner is right for you.
Go!SCAN SPARK: speed, simplicity, efficiency
This model has been developed to provide the fastest and easiest way to make 3D measurements for product development, design and reverse engineering professionals. Go!SCAN SPARK opened up three new possibilities for engineers and designers: nine0003
-
develop innovative products of complex shape and design;
-
attract new customers by raising production to a higher level;
-
Gain a competitive edge and accelerate time-to-market for innovative products.
Speed
Thanks 9With 9 lines of white illumination capable of up to 1. 5 million measurements per second, Go!SCAN SPARK can scan objects in minutes and quickly transfer data to reverse engineering, CAD or 3D printing software.
5 million measurements per second, Go!SCAN SPARK can scan objects in minutes and quickly transfer data to reverse engineering, CAD or 3D printing software.
Simplicity
Go!SCAN SPARK is not only capable of scanning with fewer marks, but in terms of geometry and texture tracking capabilities, the scanner is second to none. With it, engineers and designers, who are usually not experts in 3D scanning, simply select the most appropriate positioning mode - by geometry, texture or marks. Easier nowhere. nine0003
Efficiency
With instant meshing and tight integration with Go!SCAN 3D modeling software, SPARK is considered the most efficient handheld 3D scanner on the market, and the entire measurement workflow from setup to real-time scanning to finished files takes record time.![]()
Thus, Go!SCAN SPARK allows you to quickly and effortlessly measure complex surfaces, scan any object with fewer marks and no preliminary preparation of details, and capture texture and color with an impressive level of detail. nine0003
HandySCAN SILVER Series: precision, proven technology, versatility
SILVER 3D scanners are the best value for money for professionals and entrepreneurs who want to develop products according to the needs and requests of customers, as well as sign more contracts, grow their business and achieve new goals.
Precision
The HandySCAN 307 and 700 provide accurate and reliable 3D measurements regardless of setup quality or user experience. With dynamic referencing, the scanner and workpiece can be freely moved during measurement without sacrificing scan accuracy or quality. nine0003
Proven and reliable technology
The SILVER series scanner will be a profitable purchase due to its reasonable price and high performance. The well-proven technology, designed and manufactured in North America and already with over 5,000 users, demonstrates that Creaform prioritizes attentive service, reliability and a commitment to making its solutions available to as many professionals as possible.
The well-proven technology, designed and manufactured in North America and already with over 5,000 users, demonstrates that Creaform prioritizes attentive service, reliability and a commitment to making its solutions available to as many professionals as possible.
Thanks to the user-friendly interface and ergonomic design, the SILVER series 3D scanner is very easy to learn and use, regardless of the experience or competence of the user. The versatility of the device allows you to scan objects of any size, complexity, material or color.
The devices are part of the HandySCAN 3D family, the industry standard for metrology-grade portable 3D scanners. Providing the best value for money, this proven and reliable patented technology enables any user to make accurate and repeatable 3D measurements of any complexity in any environment. nine0003
HandySCAN BLACK Series: Speed, Metrology Grade Measurements, Versatility
The BLACK series is the flagship of the HandySCAN 3D line, the industry standard for metrology-grade portable 3D scanning. These scanners have been designed for three specific user groups. It:
These scanners have been designed for three specific user groups. It:
-
product development engineers who need to innovate and develop complex shapes to offer better and more competitive solutions; nine0003
-
quality control teams and production departments whose tasks include optimizing the production process, identifying and eliminating emerging problems and avoiding downtime;
-
quality control specialists who must verify that customer requirements have been met and confirm that the parts are suitable for their intended use for end users.
nine0072
Speed
Thanks to 11 blue laser units, combined with high-resolution cameras and original optical components, the scanner can perform up to 1.3 million measurements per second. Comparable to Go!SCAN SPARK, the speed of the entire measurement process, from setup to meshing, saves valuable data acquisition and analysis time.
3D scanning metrology class
nine0002 Belonging to the metrological class indicates the high quality of scanning, accuracy and reliability of measurements. The HandySCAN BLACK scanner is ISO 17025 certified and complies with VDI/VDE 2634 part 3 (Germany), and the accuracy of the device is 0.025 mm (with a volumetric accuracy of 0.02 mm ± 0.04 mm/m). With four times the resolution of the SILVER series, the BLACK series is ideal for scanning objects with a high level of detail such as small plastic or sheet metal parts. nine0003High flexibility
In short, HandySCAN BLACK are truly versatile 3D scanners. With an adaptable area and unlimited scan volume, the device can measure any part, regardless of size, shape, surface quality or complexity. In addition, the scanners have several blue lasers, which is the best suited for measuring complex surfaces.
Comparison of 3D scanners
nine0066 What would be the best solution for you?If you value speed and convenience more than accuracy and versatility, Go!SCAN SPARK is the one for you. The ISO 17025 accredited HandySCAN BLACK is the best option for achieving the highest accuracy and detail, as well as complete measurement uniformity. HandySCAN 3D SILVER series is a proven and reliable technology, which is characterized by an affordable price and high performance.
Go!SCAN SPARK is a solution for product development and reverse engineering departments who want to bring new products to market faster, while HandySCAN SILVER is a device for professionals and entrepreneurs who need to develop better products to grow their business and achieve new goals. And finally, HandySCAN BLACK are versatile 3D scanners that can be used at all stages of the product lifecycle management process, from development to production, assurance and quality control.